Medições de potência precisas e altamente dinâmicas
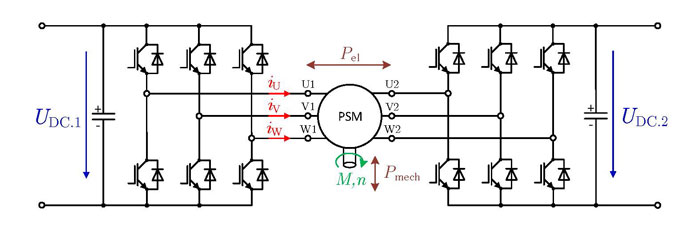
A avaliação e o teste de motores elétricos juntamente com as estratégias correspondentes de controle em aplicações industriais e de mobilidade elétrica necessitam de medições precisas e altamente dinâmicas. O sistema elétrico nestes campos de aplicação normalmente consiste de um inversor de dois níveis, um motor elétrico de três fase e o fornecimento de energia correspondente.
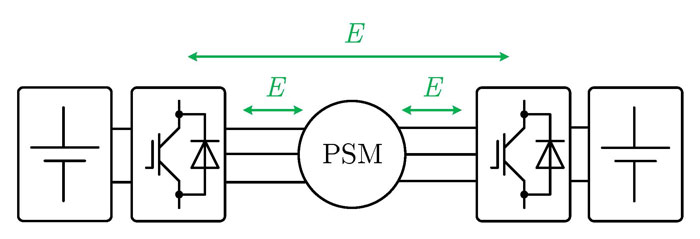
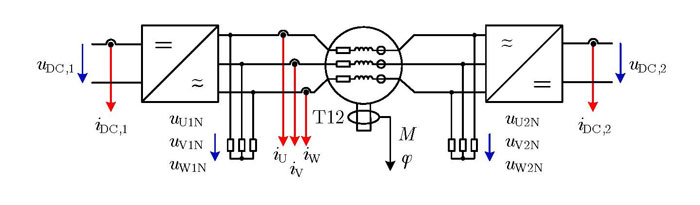
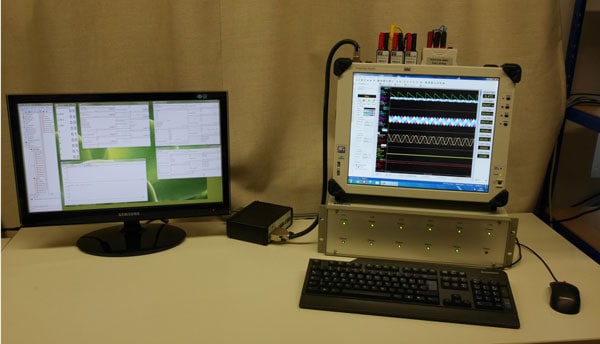
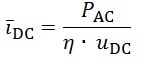
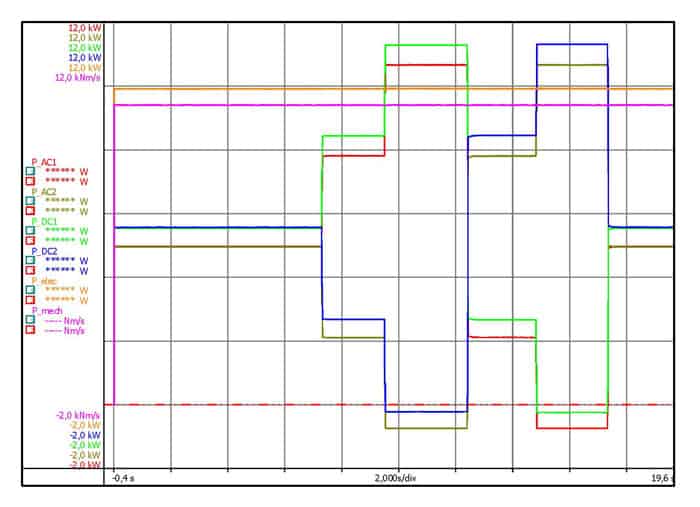
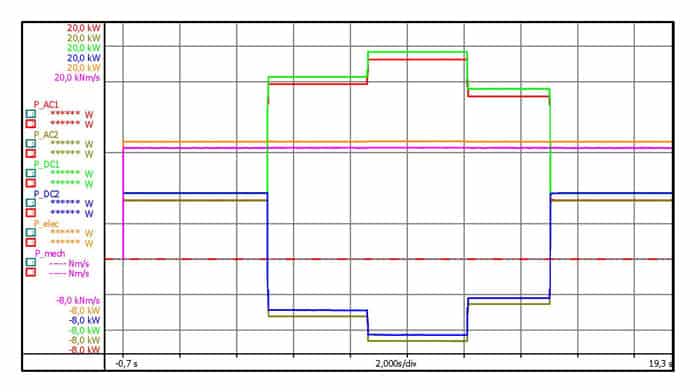
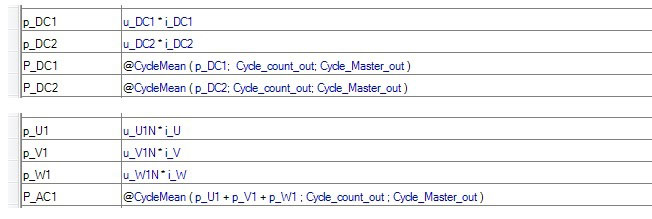
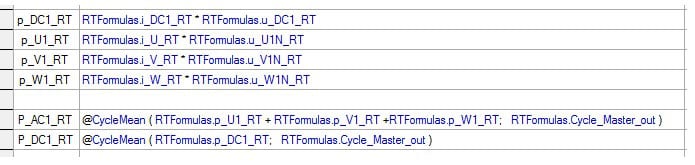
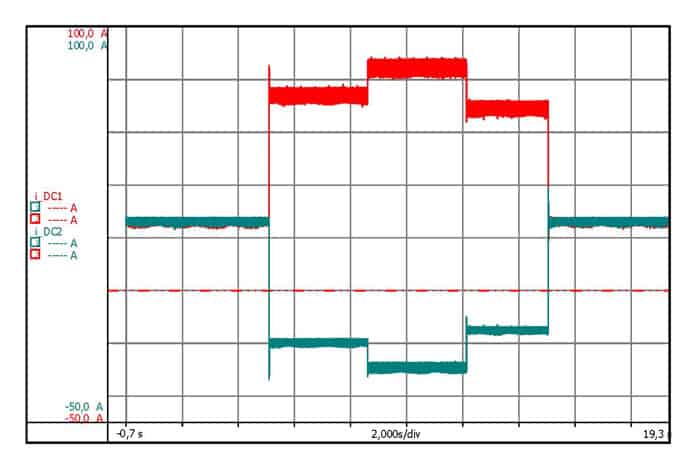
Neste artigo, a topologia do inversor duplo de dois níveis (DTLI - dual two-level inverter) é apresentada pela primeira vez em profundidade. Em seguida, uma apresentação da aquisição de variáveis mecânicas e elétricas com o sistema de aquisição de dados GEN3i e o cálculo de valores de potência em tempo real.