No final do dia, a maioria das aplicações possuem restrições de tamanho e custo, o que determinará muitas das variáveis antes mesmo do início do projeto do motor.
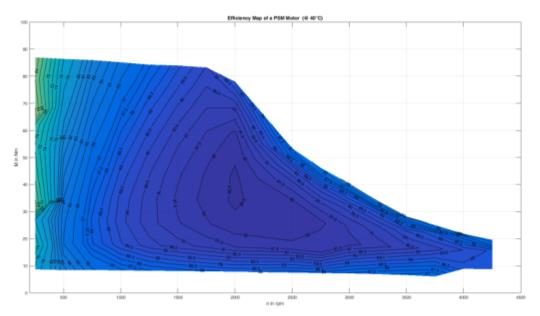
Portanto, temos a escolha da topologia e pequenos detalhes, baseados no esquema de controle que os grupos desejam usar. Também há escolhas que podem ser feitas com o resfriamento e como os motores são excitados. Os principais tipos de motores são de indução, imã permanente, campo de excitação e relutância chaveada. Motores de indução são os mais fáceis de controlar, os entendemos melhor e, portanto, são o cavalo de carga da indústria. Entretanto, sua desvantagem é que o campo precisa ser excitado, o que resulta em perdas. Motores de imã permanente (PM) são usados em diversas aplicações onde a eficiência é importante e o tamanho é uma restrição, pois possuem maior densidade de potência porque o imã fornece o campo magnético ao invés de termos perdas no rotor.
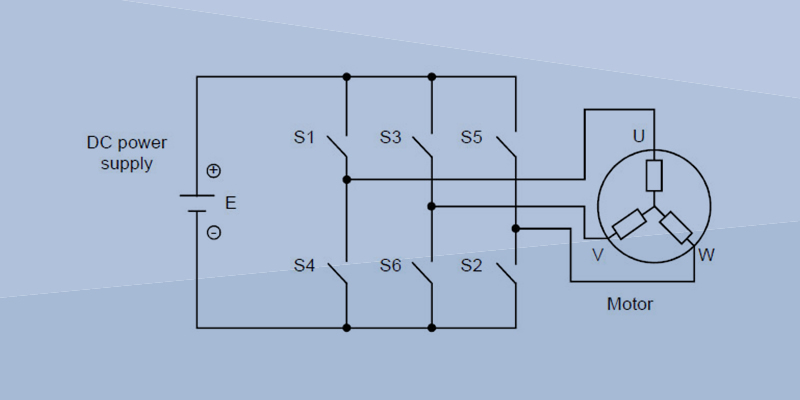
Estes motores PM precisam de um inversor, muita refrigeração e cuidado na operação em diferentes modos. Também possuem a desvantagem de perda da CPSR (Constant Power Speed Ratio) porque o campo não pode ser enfraquecido tão facilmente. Este enfraquecimento é um método de redução do campo magnético do rotor para aumentar a velocidade de um motor. Podem enfraquecer o campo no motor indutivo ou motor PM injetando correntes no eixo q. A necessidade de controlar as quantidades da corrente no eixo q (usado para controlar o torque) ou eixo d (usado para controlar o campo do rotor) para o FOC é uma razão pela qual diversos grupos estão interessados em monitorar suas curvas dq0 em tempo real. Com uma máquina PM, muitos aspectos precisam ser levados em conta porque os imãs podem se desmagnetizar durante o enfraquecimento do campo e a força contra eletromotriz precisa ser monitorada.
Motores SR (Synchronous Reluctance) possuem um rotor muito simples que é simplesmente uma laminação com um padrão específico. Estes motores usam a propriedade de torque de relutância para criar rotação. Estes motores são muito usados em uma variedade de aplicações por conta de sua construção simples, tendo a desvantagem de gerar muito barulho e vibração. Por conta disso, eles só têm sido utilizados em condições específicas. Durante o ensaio destes motores, os pesquisadores estão principalmente interessados em ter um mapa de vibração de onde o torque e a vibração são mais fortes.