
- Every module is a data acquisition unit
- Mobile and stand-alone for vehicle testing
- Integrated in real-time for bench testing
- Portable for service jobs
- Permanently installed in monitoring applications
QuantumX: The Universal and Distributable Data Acquisition System
The QuantumX data acquisition system (DAQ) is the perfect tool for all of your test and measurement needs. For reliable data acquisition of different physical quantities and sensor technologies, QuantumX is the preferred choice. It has the unique capability to acquire any signal and sensor information.
Flexible
Reliable
- Established in the market for 10 years and trusted by thousands of customers
- High measurement accuracy due to patented technology
- Long-term stability along with an integrated calibration certificate
Easy to use
- Small and portable
- Intuitive operation by HBM’s catman software
- Open for many different software platforms: LabView, Visual Studio .NET, DIAdem, CANape, DASYlab, and more!
A Reliable Measurement Chain
The highly precise, universal, and reliable data acquisition system QuantumX can be combined perfectly with HBM's sensors and the catman software to have a complete measurement and testing solution. From the sensor to the software: simply "plug and measure".

Versatile Applications
 Lab and Bench Testing
Lab and Bench Testing
- Structural durability testing
- Powertrain, engine, drivetrain testing in dynos
- Mechanical and electric system and component testing
- Aerodynamics analysis / wind tunnel testing
 Mobile Data Acquisition
Mobile Data Acquisition
- Mobile acquisition of load on mechanical components on bad roads or track
- Testing of vehicle dynamics (ride and handling)
- Brake or acceptance tests
- Overall vehicle or track monitoring
 Aircraft Testing
Aircraft Testing
- Structural durability testing / Fatigue testing
- Propulsion testing (thrust, performance, durability)
- Iron bird testing
- Impact testing: drop and impact testing (bird, drone)
- Center of gravity analysis
 Electric Drives & Energy Storage
Electric Drives & Energy Storage
 Service/Maintenance
Service/Maintenance
- Machine calibration
- Fault-investigation and diagnostics
 Infrastructural Health Monitoring
Infrastructural Health Monitoring
Customer Stories & Testimonials

Sikorsky, a Lockheed Martin Company, and HBM have concluded the Operational Readiness Review (ORR) for the new GEN6 Data Acquisition System, which will now officially go into operation.
Based on the QuantumX universal and distributable data acquisition system from HBM and developed in close cooperation with the customer, the new GEN6 Data Acquisition System will empower Sikorsky's Laboratories with new capabilities for data acquisition, handling, and storage.

"We had narrowed down our selection process to four measuring amplifier systems. Then QuantumX from HBM won us over in the practical test, especially with its extremely low measurement uncertainty."
Bruno Kanzenbach, Senior Engineer at Toyota Motorsport GmbH (TMG)

“We selected QuantumX because we could plug anything into it quite easily and it has an excellent recording capacity both in terms of the recording span and the rate”.
Matt Williams, Senior Structural Test Engineer at Agusta Westland

QuantumX Module Comparison
Find and compare the QuantumX modules you need by clicking on the image to the right.
Choose which measurement module or system is right for you based on channel count, sample rate, or signal type, such as voltage, current, strain gauge type, etc.
Once you find the right QuantumX product that fits your needs, scroll down the page to that particular module to learn more.
Click on the image to the right to enlarge.
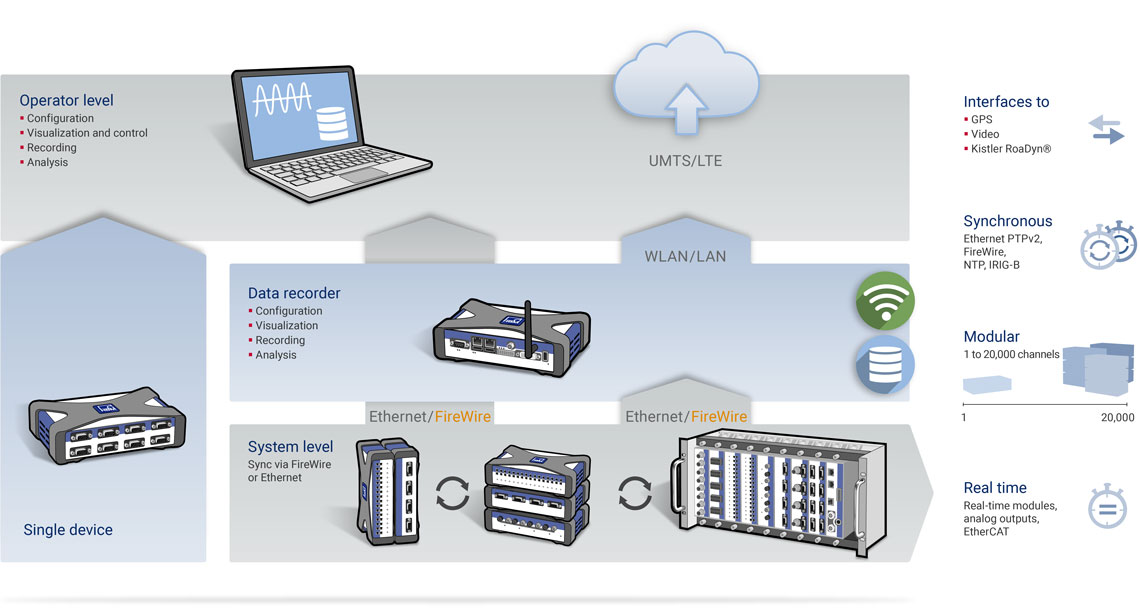
Modular Concept
Connect a single module to your PC and start working
Distribute several modules and install them close to your measurement spots and sensor
Scale several hundred channels in a centralized way for high channel density
Use the powerful data recorder for your autonomous mobile test and integrate into the cloud
Integrate in real-time in automated bench testing
Design your own test with signal stimulation in real-time
Integrate any sensor and transfer its digital value to CAN or analog voltage output (gateway).
QuantumX Modules
MX440B and MX840B universal amplifiers
4- or 8-channel universal amplifier of the QuantumX family
It supports the following transducer technologies:
- Full-bridge or half-bridge strain gauges (DC or 4.8 kHz carrier frequency)
- SG quarter bridge with adapter
- Current-fed piezoelectric transducers (IEPE / ICP®)
- Piezoresistive full bridge
- Resistance thermometers (PT100 / PT1000)Thermcouples (types K, N, R, S, T, B, E, J, C)
- Ohmic resistor
- Potentiometric transducers (Poti)
- Inductive half or full bridge, LVDT
- Voltage (± 100mV, ± 10V, ± 60V) and Current (0 / 4 … 20 mA, 2-/3- or 4-wire)
- Channel 5-8, in addition: frequency, counter, rotary encoder, SSI
- CAN bus
Product details HBMshop Calibrate your module

MX1615B/MX1616B strain gauge bridge amplifier
16-channel bridge amplifier of the QuantumX family
It supports the following transducer technologies:
- SG full or half bridge (DC or 1200Hz carrier frequency)
- SG quarter bridge (DC or 1200 Hz carrier frequency, 120/350/1000 ohm completion resistors)
- Voltage (± 10 V)
- Resistance thermometers (Pt100)
- Resistor
- Potentiometer (Poti)
Product details HBMshop Calibrate your module

MX410B universal amplifier
4-channel, highly-dynamic universal amplifier of the QuantumX family
It supports the following transducer technologies:
- SG half or full bridge (DC or CF with 4.8 kHz carrier frequency)
- SG quarter bridge via adapter
- Current-fed piezoelectric transducers (IEPE, ICP)
- Piezoresistive full bridge
- Inductive full or half-bridges
- Voltage (±10 V)
- Current ( 0 / 4...20 mA, 2-/3- or 4-wire)
- Analog voltage outputs (±10 V)
Product details HBMshop Calibrate your module

MX460B pulse and frequency measurement module
4-channel, highly-dynamic digital module of the QuantumX family for the acquisition of torque, rotational speed, angle, position, and displacement
It supports the following transducer technologies:
- Digital, high-resolution frequency inputs (e.g. HBM’s torque flange)
- Pulse counter, incremental encoder, encoder
- Passive inductive rotational speed sensors (AC coupled)
- Pulse-width modulated signals (PWM)
Product details HBMshop Calibrate your module

MX430B full-bridge amplifier
4-channel bridge measurement module of the QuantumX family for precise measurement of strain-gauge-full-bridge-based transducers (dynamic, static)
It supports the following transducer technologies:
- Strain gauge full bridge (DC, 600 Hz carrier frequency)
Product details HBMshop Calibrate your module

MX238B precision measuring amplifier
2-channel precision measurement module of the QuantumX family for precise measurement when SG-full-bridge-based transducers are connected
It supports the following transducer technologies:
- SG full bridge (225 Hz carrier frequency)
Product details HBMshop Calibrate your module

MX1601B universal amplifier
16-channel amplifier of the QuantumX family
It supports the following transducer technologies:
- Current-fed piezoelectric transducers (IEPE, ICP)
- Voltage (±100 mV, ±10 and ±60 V)
- Current (0/4 ... 20 mA, 2-/3- or 4-wire)
Product details HBMshop Calibrate your module

MX1609 thermocouple amplifier
16-channel thermocouple amplifier of the QuantumX family
It supports the following transducer technologies:
- Type K thermocouples (MX1609KB)
- Type T thermocouples (MX1609TB)
Product details HBMshop Calibrate your module

MX809B insulated thermocouple amplifier
8-channel thermocouple amplifier of the QuantumX family for insulated and reliable thermocouple measurements in an electrical environment
It supports the following transducer technologies:
- Thermocouple types K, J, T, B, E, N, R, S, C with internal cold junction for each channel
- Voltage (±5 V)
Product details HBMshop Calibrate your module
 MX403B isolated voltage module
MX403B isolated voltage module
4-channel module for electrically isolated voltage measurement with the QuantumX family
It supports the following measurands:
- Voltage (10, 100 and 1000 V)
- Measurement categories: 1250 V (non CAT), 1000 V CAT II, 600 V CAT III
Product details HBMshop Calibrate your module
 MXFS optical interrogator module
MXFS optical interrogator module
128-channel module to integrate optical and electrical measurements into your QuantumX measurement chain
- Fiber Bragg Grating (FBG) based measurement of strain, force, acceleration or inclination
- With 128 channels per module high sensor density and cost-effective solution
- Operates as a single module but also fully time-synchronized as gateway to other QuantumX modules
- Offers selectable sample rates up to 2000 S/s per channel (sensor)

MX471C CAN FD / Classic CAN module
4-channel CAN module supports CAN FD or Classic CAN
- Receive: Time-synchronous acquisition of CAN messages and signals (embedded decoding)
- Receive: Raw message acquisition of full CAN bus traffic and PC based decoding
- Receive: Scale up to an unlimited amount of modules with e.g. 20 CAN nodes in total
- Transmit: Send out any acquired analog measurement signal with e.g. MX1615B or any other module
- Gateway: CAN FD to CAN gateway with re -packaging of messages
- Gateway: Send out all data from directly connected modules via Ethernet and optionally time-sync with PTPv2
- Internal, switchable termination resistor

CX22B-W data recorder
The CX22B-W data recorder is the perfect data logger:
- Internal data storage of all the signals of the connected QuantumX/SomatXR modules
- Stand-alone recording in a robust data format, export to other formats
- Gateway functionality (LAN, WLAN) to the PC
- Powerful signal computation and analysis, e.g. counting, FFT, electrical power and efficiency calculations
- Impressive visualization options
- Integration of cameras (photo, video), positioning (GPS/GNSS), measuring wheels, wheather station
- Signal and system status alarms/notifications
- Easy control (touchscreen, remote, or directly connected keyboard)

CX27C gateway module
The CX27C gateway offers simple integration options:
- Connect your QuantumX system via Ethernet link to your PC – acquire and analyse all data with catman Easy/AP software using the highest data rate possible
- Connect your QuantumX via xCP-on-Ethernet to any CAL software running on your PC
- In parallel, integrate your QuantumX or SomatXR system in real-time into your EtherCAT™ or PROFINET IRT network for control, automation or just monitoring purposes. Scales several CX27C in one DAQ system
MX471C CAN FD / Classic CAN module
4-channel CAN module supports CAN FD or Classic CAN
- Receive: Time-synchronous acquisition of CAN messages and signals (embedded decoding)
- Receive: Raw message acquisition of full CAN bus traffic and PC based decoding
- Receive: Scale up to an unlimited amount of modules with e.g. 20 CAN nodes in total
- Transmit: Send out any acquired analog measurement signal with e.g. MX1615B or any other module
- Gateway: CAN FD to CAN gateway with re -packaging of messages
- Gateway: Send out all data from directly connected modules via Ethernet and optionally time-sync with PTPv2
- Internal, switchable termination resistor
Product details HBMshop Calibrate your module
MXFS optical interrogator module
128-channel module to integrate optical and electrical measurements into your QuantumX measurement chain
- Fiber Bragg Grating (FBG) based measurement of strain, force, acceleration or inclination
- With 128 channels per module high sensor density and cost-effective solution
- Operates as a single module but also fully time-synchronized as gateway to other QuantumX modules
- Offers selectable sample rates up to 2000 S/s per channel (sensor)

MX878B analog output module
8-channel module for the output of analog voltages within the QuantumX family
The module offers the following possibilities:
- 8 analog voltage outputs (± 10V) for real-time output of any sensor inputs
- Real-time computation (matrix, PID, alarms, etc.)
- Set profile output (harmonic or arbitrary)
- Direct control from the PC level
Product details HBMshop Calibrate your module

MX879B multi / IO module
Multi I/O module of the QuantumX family for the output of analog voltages and digital input/output within the QuantumX family
The module offers the following possibilities:
- 8 analog voltage outputs (± 10V) for real-time output of any sensor inputs
- 32 digital inputs/outputs (5 V, 24 V, up to 500 mA)
- Real-time computation (matrix, PID, alarms, etc.)
- Set profile output (harmonic or arbitrary)
- Direct control from the PC level
Product details HBMshop Calibrate your module
MX471C CAN FD / Classic CAN module
4-channel CAN module supports CAN FD or Classic CAN
- Receive: Time-synchronous acquisition of CAN messages and signals (embedded decoding)
- Receive: Raw message acquisition of full CAN bus traffic and PC based decoding
- Receive: Scale up to an unlimited amount of modules with e.g. 20 CAN nodes in total
- Transmit: Send out any acquired analog measurement signal with e.g. MX1615B or any other module
- Gateway: CAN FD to CAN gateway with re -packaging of messages
- Gateway: Send out all data from directly connected modules via Ethernet and optionally time-sync with PTPv2
- Internal, switchable termination resistor
catman data acquisition software
catman software from HBM bundles perfectly with QuantumX and SomatXR. catman allows a remarkable visualization of your sensor and digital data, stores data in a robust binary format, can be automated, analyses data on the fly or in post-process mode and generates test reports.
- Visualization of measurement data
- Online analysis through powerful math library
- Store and export data in various formats
- Analysis of data
- Reporting

QuantumX provides you supplementary accessories for your measurement applications and projects.
QuantumX Video & Brochure
This video shows the many features QuantumX offers.
This video shows you how to use our catman Enterprise software to parameterize and visualize large numbers of measurement channels.