Precise and highly dynamic power measurements
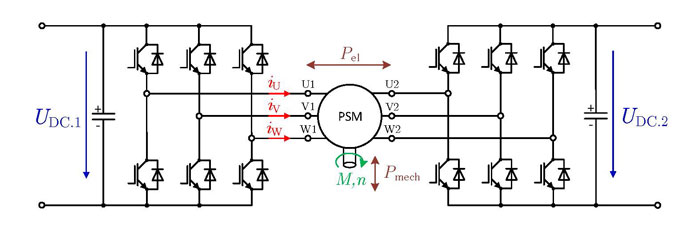
The evaluation and testing of electric drives along with the corresponding control strategies in industrial and electrical mobility applications require precise and highly dynamic power measurements. The electrical system in these fields of application normally consists of a two-level inverter, a three-phase electrical machine and the corresponding energy supply.
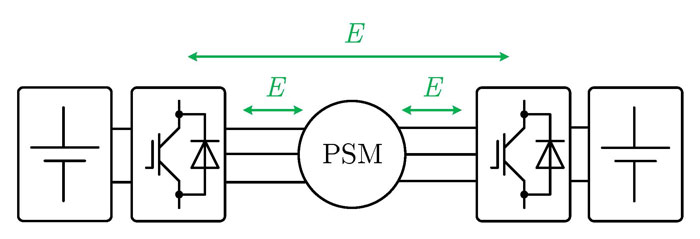
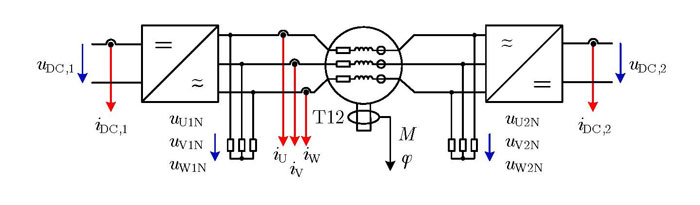
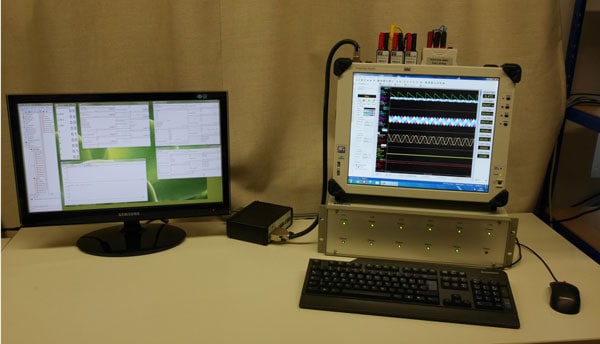
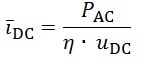
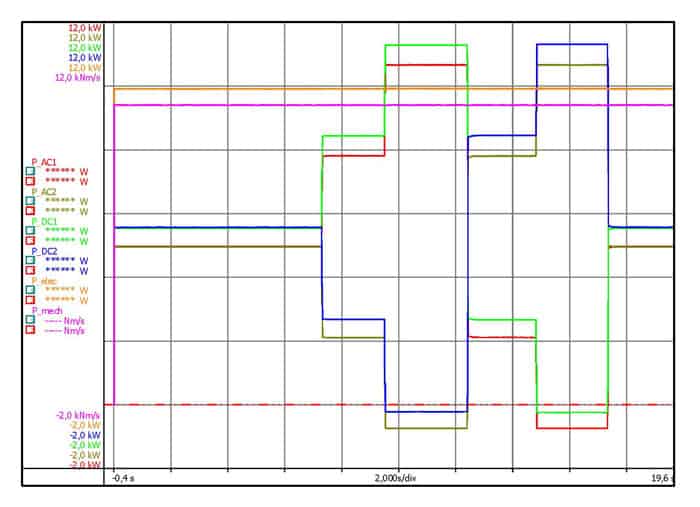
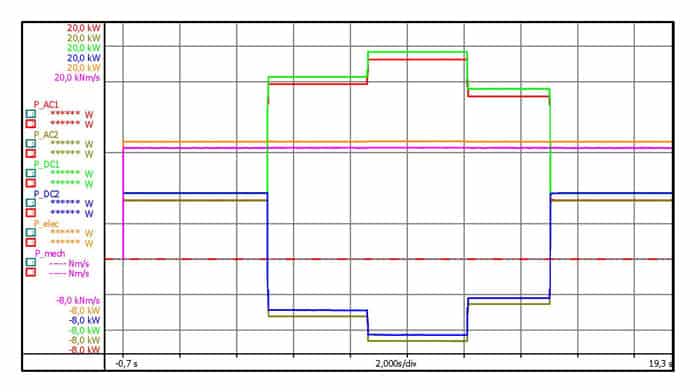
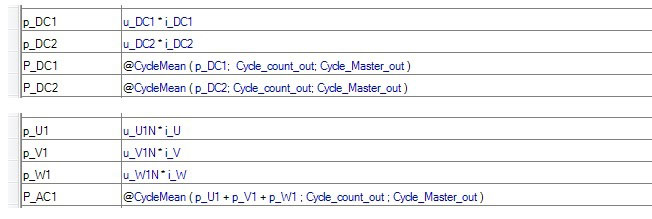
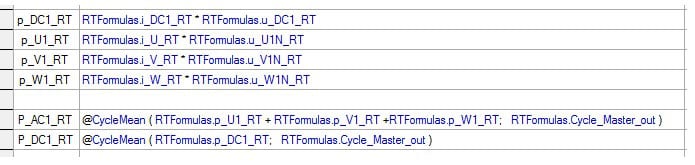
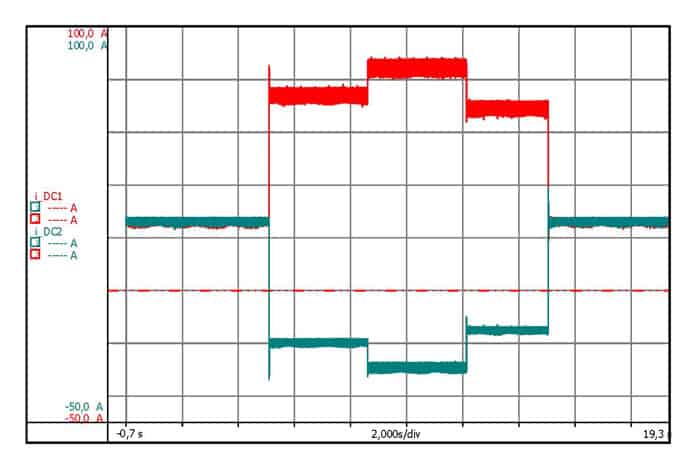
In this article the topology of the dual two-level inverter (DTLI) is first presented in depth. This is followed by a presentation of the acquisition of mechanical and electrical variables with the GEN3i data acquisition system and calculation of the real-time power values.