The accuracy class provides practical guidance on the respective type series’ grouping within the HBM range of products. It must not be mistaken for the overall accuracy in practical use, with different individual influences acting at the same time.
Example:
We look at two versions of the T10F torque flange: on the one hand, option "S" (standard version) and on the other hand, option "G" (that is, reduced linearity deviation incl. hysteresis) in each case for the measuring ranges from 100 N·m to 10 kN·m.
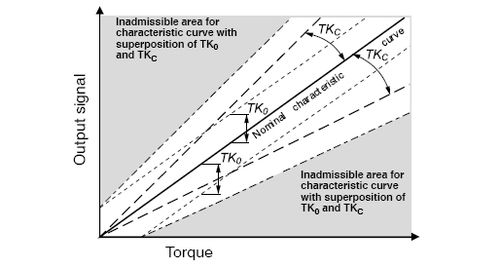
In the data sheet the following maximum values are specified for the "S" version: 0.05 % for the temperature effect on the zero signal (TK0), 0.1 % for the temperature effect on sensitivity (TKC), and ±0.1 % for the linearity deviation incl. hysteresis (dlh). Due to the two values given last, the accuracy class is specified as 0.1. Version "G", however, offers an improved linearity deviation incl. hysteresis (dlh) amounting to 0.05 % only.
The temperature effect on sensitivity (TKC) is still 0.1 % and thus is the maximum deviation among those given as percentages. Therefore, the accuracy class for version "G" still has to be specified as 0.1.
Apparently, version "G" does not provide any increased benefit. However, it shows the relatively biggest effect only with regard to one characteristic value, the TKC. In addition, this characteristic value is the only measure for deviations related to the actual value. As a consequence, its influence is considerably smaller, for example, with measurements in the partial load range.