

Temperature conditions:
- Temperature difference to the reference value: 40 °C (for TCC)
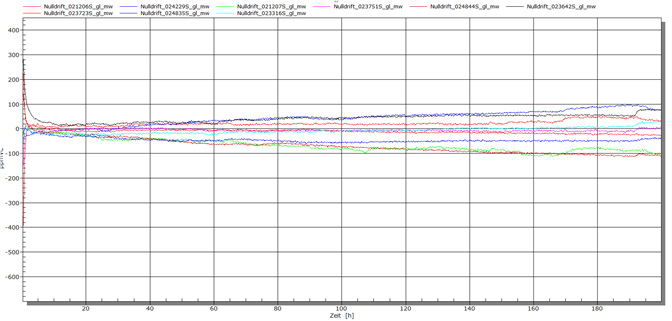
- Temperature stability: 1 °C (for TCzero)
Force application:
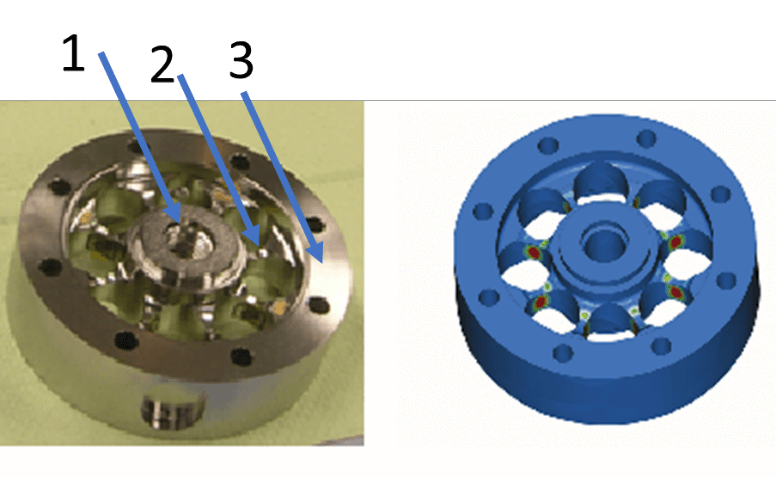
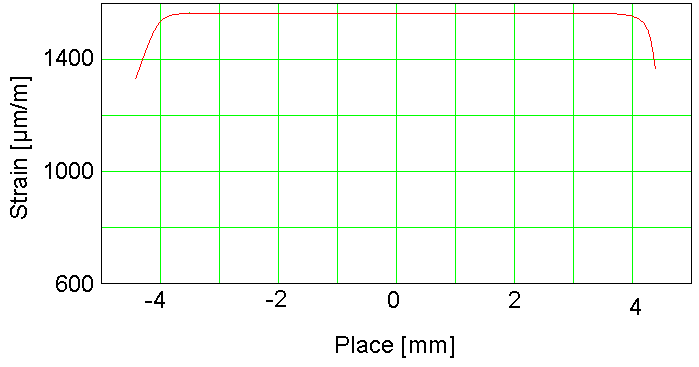
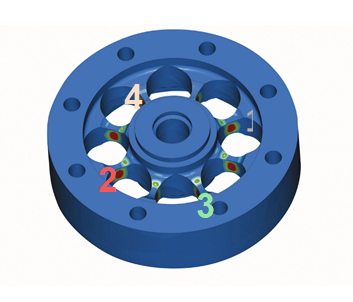
- Central introduction of force with very low tolerance
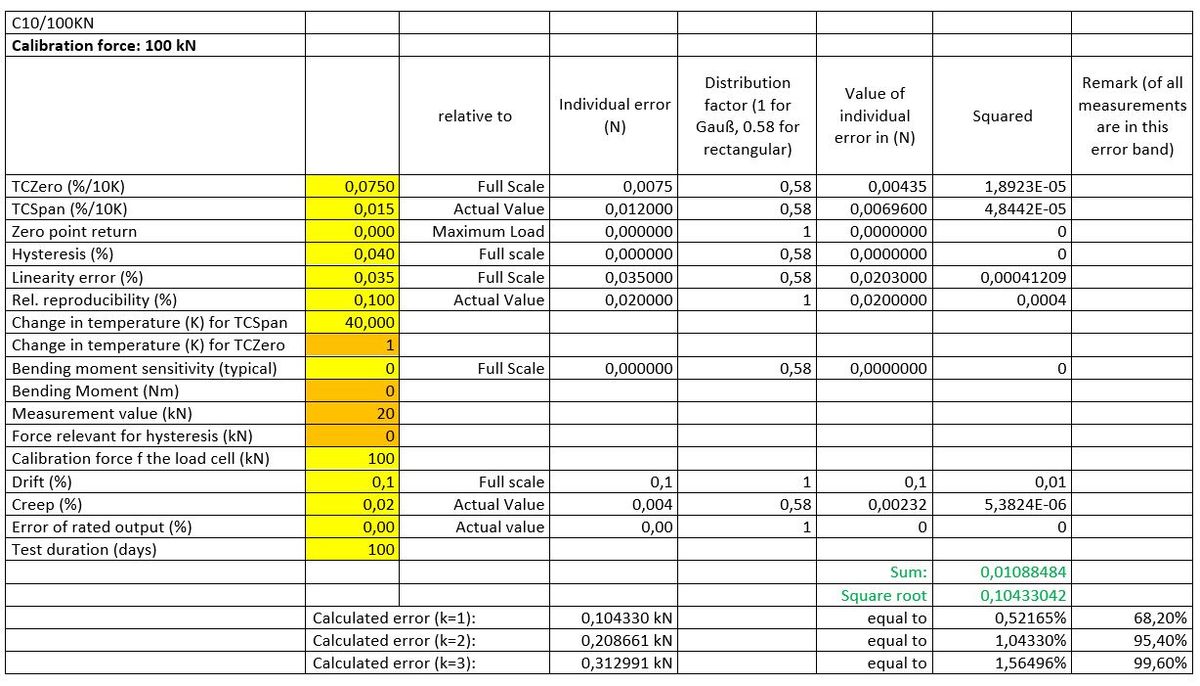
Let’s assume a scenario with a force response that increases linearly over the test run, starting with forces of about 100 N up to forces of 100 kN. A C10/100KN force transducer from HBK is used.
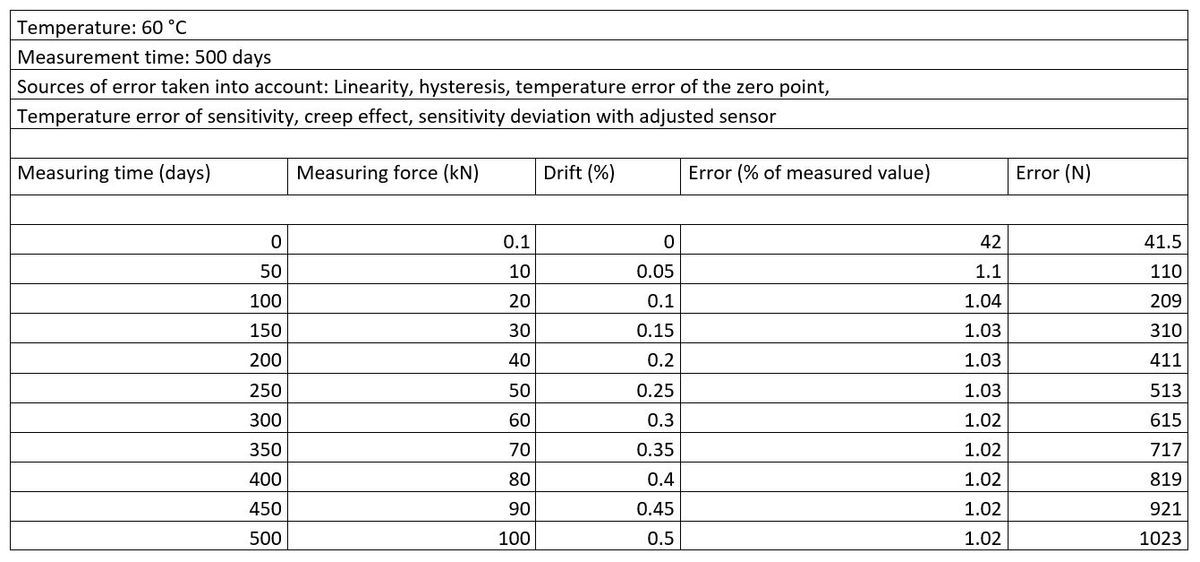
It is, therefore, necessary to calculate the error at different points over the time-force response. To keep the model simple, we assumed a linear increase in force (0 N on the first day, 100 kN after 500 days).
The relevant individual errors were documented in the table shown in Figure 7.
The result for the hundredth day is shown as an example, with a force of approximately 20 kN.