
- 每個模組都是一個資料獲取單元
- 車輛測試用獨立移動設備
- 台架測試即時集成
- 便攜,適合檢測服務
- 也適合用於監控應用
QuantumX: 通用,分散式資料獲取系統
QuantumX 資料獲取系統能可靠採集多種物理量並連接多種感測器,是滿足您測試和測量多種需求的理想工具。
靈活
可靠
- 歷經 10 年,久經驗證
- 專利技術,極高的測量精度
- 長期穩定性並內置校準證書
容易使用
- 小巧且便攜
- 通過 HBM catman 軟體直觀操作
- 面向多個軟體平臺開放: LabView, Visual Studio .NET, DIAdem, CANape, DASYlab, …
可靠測量鏈
可靠,高精度、通用資料獲取系統 QuantumX 可以與HBM感測器和 CATMAN 軟體完美地結合在一起,提供完整的測量和測試解決方案。從感測器到軟體:“即插即測”。

多種應用
 實驗室和測試台
實驗室和測試台
- 結構耐久性測試
- 動力系,發動機和台架測試
- 机电系统和零部件测试
- 空气动力学分析/风洞试验
 汽車資料獲取
汽車資料獲取
- 汽車及零部件路測
- 車輛動力學測試(駕駛和操縱)
- 制動或驗收試驗
- 車輛或軌道整體監測
 飛機測試
飛機測試
- 結構耐久性測試 / 疲勞測試
- 推進測試(推力、性能、耐久性)
- 鐵鳥測試
- 衝擊試驗:跌落和衝擊試驗(鳥,無人機)
- 重心分析
應用案例

西科爾斯基,洛克希德·馬丁公司, 與 HBM 共同合作的 GEN6 資料獲取系統已經通過操作準備審查(ORR) ,現在正式投入使用。
基於 QuantumX 通用資料獲取系統的 GEN6 資料獲取系統主要用於西科爾斯基實驗室,進行資料獲取,處理和存儲。

"我們把選擇過程縮小到四個測量放大器系統。最終,在實際測試中,HBM 放大器系統贏得了我們的青睞,尤其是其測量不確定度非常低。"
豐田汽車有限公司高級工程師 Bruno Kanzenbach (TMG)

“我們選擇 QuantumX 放大器系統的原因主要是其連接非常方便,並且具有優異的資料記錄能力,取樣速率高”.
Agusta Westland 高級結構測試工程師 Matt Williams

QuantumX 模組對比
點擊右側圖像來查找和比較所需的 QuantumX 模組
根據測量通道數、取樣速率或信號類型,例如電壓、電流、應變片類型等,選擇哪種測量模組或系統是合適的。
一旦找到適合您需要的 QuantumX 產品,向下滾動頁面到特定模組以瞭解更多資訊。
點擊右邊的圖片放大。
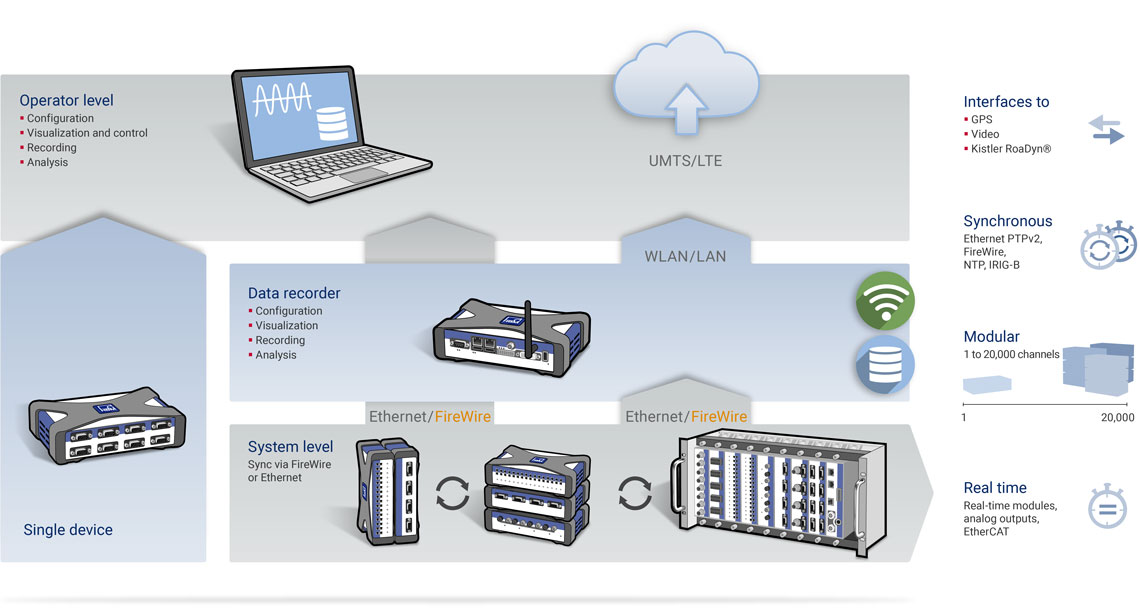
模組化概念
將單個模組連接到PC並開始工作
模組緊靠測量點進行安裝,組成分散式系統
可升級到數百個測量通道
強大的資料記錄儀功能,進行移動採集,並集成到雲
台架測試的即時集成
集成感測器,並將其數位值傳輸到CAN或類比電壓輸出(閘道)。
QuantumX 模組
MX440B and MX840B universal amplifiers
4- or 8-channel universal amplifier of the QuantumX family
It supports the following transducer technologies:
- Full-bridge or half-bridge strain gauges (DC or 4.8 kHz carrier frequency)
- SG quarter bridge with adapter
- Current-fed piezoelectric transducers (IEPE / ICP®)
- Piezoresistive full bridge
- Resistance thermometers (PT100 / PT1000)Thermcouples (types K, N, R, S, T, B, E, J, C)
- Ohmic resistor
- Potentiometric transducers (Poti)
- Inductive half or full bridge, LVDT
- Voltage (± 100mV, ± 10V, ± 60V) and Current (0 / 4 … 20 mA, 2-/3- or 4-wire)
- Channel 5-8, in addition: frequency, counter, rotary encoder, SSI
- CAN bus
Learn more HBMshop Calibrate your module
![]()
MX410B universal amplifier
4-channel, highly-dynamic universal amplifier of the QuantumX family
It supports the following transducer technologies:
- SG half or full bridge (DC or CF with 4.8 kHz carrier frequency)
- SG quarter bridge via adapter
- Current-fed piezoelectric transducers (IEPE, ICP)
- Piezoresistive full bridge
- Inductive full or half-bridges
- Voltage (±10 V)
- Current ( 0 / 4...20 mA, 2-/3- or 4-wire)
- Analog voltage outputs (±10 V)
Learn more HBMshop Calibrate your module
![]()
MX460B pulse and frequency measurement module
4-channel, highly-dynamic digital module of the QuantumX family for the acquisition of torque, rotational speed, angle, position, and displacement
It supports the following transducer technologies:
- Digital, high-resolution frequency inputs (e.g. HBM’s torque flange)
- Pulse counter, incremental encoder, encoder
- Passive inductive rotational speed sensors (AC coupled)
- Pulse-width modulated signals (PWM)
Learn more HBMshop Calibrate your module
![]()
MX430B full-bridge amplifier
4-channel bridge measurement module of the QuantumX family for precise measurement of strain-gauge-full-bridge-based transducers (dynamic, static)
It supports the following transducer technologies:
- Strain gauge full bridge (DC, 600 Hz carrier frequency)
Learn more HBMshop Calibrate your module

MX238B precision measuring amplifier
2-channel precision measurement module of the QuantumX family for precise measurement when SG-full-bridge-based transducers are connected
It supports the following transducer technologies:
- SG full bridge (225 Hz carrier frequency)
Learn more HBMshop Calibrate your module
![]()
MX1615B/MX1616B strain gauge bridge amplifier
16-channel bridge amplifier of the QuantumX family
It supports the following transducer technologies:
- SG full or half bridge (DC or 1200Hz carrier frequency)
- SG quarter bridge (DC or 1200 Hz carrier frequency, 120/350/1000 ohm completion resistors)
- Voltage (± 10 V)
- Resistance thermometers (Pt100)
- Resistor
- Potentiometer (Poti)
Learn more HBMshop Calibrate your module
![]()
MX1601B universal amplifier
16-channel amplifier of the QuantumX family
It supports the following transducer technologies:
- Current-fed piezoelectric transducers (IEPE, ICP)
- Voltage (±100 mV, ±10 and ±60 V)
- Current (0/4 ... 20 mA, 2-/3- or 4-wire)
Learn more HBMshop Calibrate your module
![]()
MX1609 thermocouple amplifier
16-channel thermocouple amplifier of the QuantumX family
It supports the following transducer technologies:
- Type K thermocouples (MX1609KB)
- Type T thermocouples (MX1609TB)
Learn more HBMshop Calibrate your module
![]()
MX809B insulated thermocouple amplifier
8-channel thermocouple amplifier of the QuantumX family for insulated and reliable thermocouple measurements in an electrical environment
It supports the following transducer technologies:
- Thermocouple types K, J, T, B, E, N, R, S, C with internal cold junction for each channel
- Voltage (±5 V)
Learn more HBMshop Calibrate your module
 MX403B isolated voltage module
MX403B isolated voltage module
4-channel module for electrically isolated voltage measurement with the QuantumX family
It supports the following measurands:
- Voltage (10, 100 and 1000 V)
- Measurement categories: 1250 V (non CAT), 1000 V CAT II, 600 V CAT III
Learn more HBMshop Calibrate your module
![]()
MX471C CAN FD / Classic CAN module
4-channel CAN module supports CAN FD or Classic CAN
- Time-synchronous acquisition of messages and signals
- Internal, switchable termination resistor (termination)

CX27C gateway module
The CX27C gateway offers simple integration options:
- Real-time integration of QuantumX/SomatXR modules (EtherCAT™ or PROFINET IRT)
for regulation, control, automation and monitoring - Parallel to this, the connection to the measurement software on the PC for
time-synchronous acquisition and analysis of signal data up to 100 kS/s per channel.
![]()
CX22B-W data recorder
The CX22B-W data recorder is the perfect data logger:
- Internal data storage of all the signals of the connected QuantumX/SomatXR modules
- Stand-alone recording in a robust data format, export to other formats
- Gateway functionality (LAN, WLAN) to the PC
- Powerful signal computation and analysis, e.g. counting, FFT, electrical power and efficiency calculations
- Impressive visualization options
- Integration of cameras (photo, video), positioning (GPS/GNSS), measuring wheels, wheather station
- Signal and system status alarms/notifications
- Easy control (touchscreen, remote, or directly connected keyboard)
![]()
MX471C CAN FD / Classic CAN module
4-channel CAN module supports CAN FD or Classic CAN
- Time-synchronous acquisition of messages and signals
- Internal, switchable termination resistor (termination)
![]()
MX878B analog output module
8-channel module for the output of analog voltages within the QuantumX family
The module offers the following possibilities:
- 8 analog voltage outputs (± 10V) for real-time output of any sensor inputs
- Real-time computation (matrix, PID, alarms, etc.)
- Set profile output (harmonic or arbitrary)
- Direct control from the PC level
Learn more HBMshop Calibrate your module
![]()
MX879B multi / IO module
Multi I/O module of the QuantumX family for the output of analog voltages and digital input/output within the QuantumX family
The module offers the following possibilities:
- 8 analog voltage outputs (± 10V) for real-time output of any sensor inputs
- 32 digital inputs/outputs (5 V, 24 V, up to 500 mA)
- Real-time computation (matrix, PID, alarms, etc.)
- Set profile output (harmonic or arbitrary)
- Direct control from the PC level
Learn more HBMshop Calibrate your module
![]()
MX471C CAN FD / Classic CAN module
4-channel CAN module supports CAN FD or Classic CAN
- Time-synchronous acquisition of messages and signals
- Internal, switchable termination resistor (termination)
catman data acquisition software
catman software from HBM bundles perfectly with QuantumX and SomatXR. catman allows a remarkable visualization of your sensor and digital data, stores data in a robust binary format, can be automated, analyses data on the fly or in post-process mode and generates test reports.
- Visualization of measurement data
- Online analysis through powerful math library
- Store and export data in various formats
- Analysis of data
- Reporting

QuantumX provides you supplementary accessories for your measurement applications and projects.
