The Genesis HighSpeed data acquisition system and the Perception Software are very powerful tools for your high speed measurements.
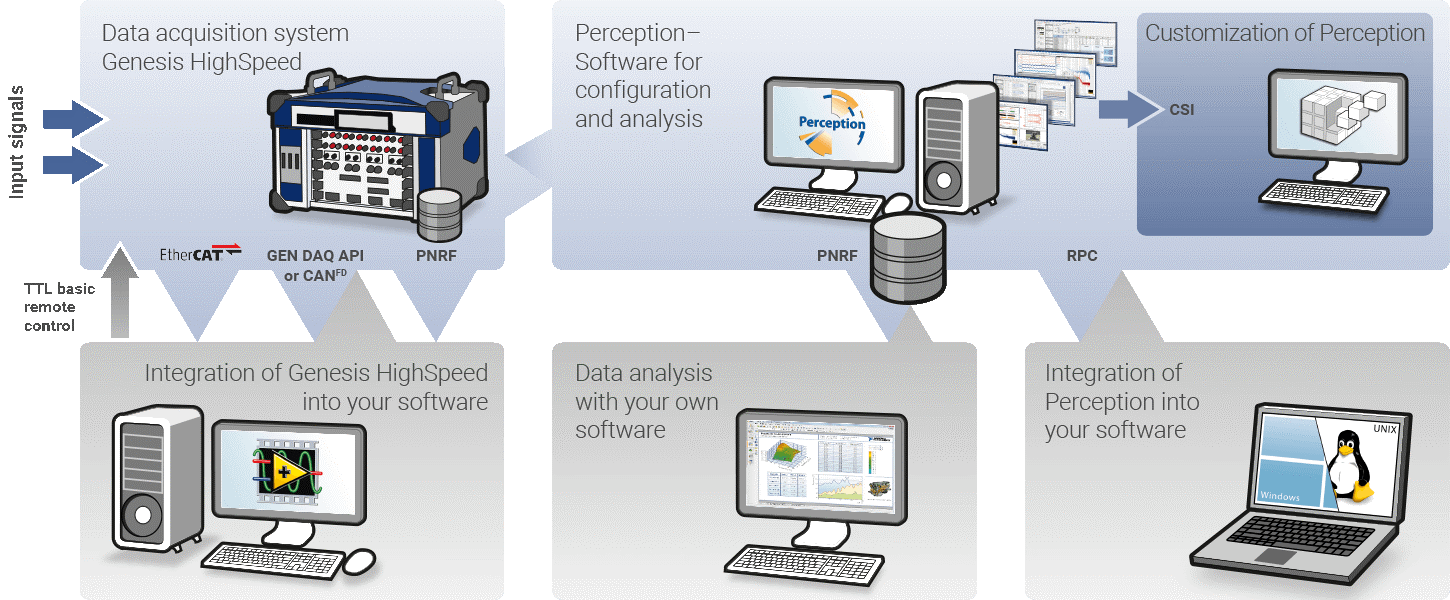
The integration of the Genesis HighSpeed data acquisition systems allows the complete control over your Genesis HighSpeed system without additional software: everything will be controlled with your (automation) system.
The further integration of the Perception software allows to use the powerful Perception software and enhance the software’s use with your own existing software.
You can integrate them into your specific environment and use them exactly the way you want by selecting one of the many different interfacing options here: GEN DAQ API, EtherCAT Interface, CAN 2.0/CANFD Interface, PNRF Reader Toolkit, Perception Remote Control, Perception Custom Software Interface (CSI).
Integration via Fieldbus
There are multiple options to integrate your Genesis HighSpeed system via Fieldbus:
- CAN2.0 / CANFD
- EtherCAT
- GEN DAQ API
- Python
All these fieldbuses can also be used in parallel for a maximum in flexibility!