Crie um canal matemático
Crie um novo canal matemático “filtro síncrono com rotação” na categoria de Análise.
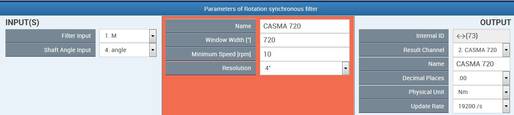
Ajuste de parâmetros
- Entrada de Filtro: Insira o sinal a ser filtrado aqui;
- Entrada de Ângulo de Eixo: Insira o sinal do ângulo do sensor de rotação aqui. Os valores medidos devem ser entre 0° e 360°;
- Largura de Janela: Especifique a faixa na qual será feita a média móvel. A largura deve ser entre 30° e 720°. O valor padrão é 180°. A razão da largura da janela pela resolução deve ser menor que 180.
A largura da janela pode ser facilmente determinada experimentalmente projetando-se o tempo periódico de perturbação ao ângulo de rotação (veja a imagem da tela). Neste exemplo, há uma perturbação periódica a cada 720°.

- Rotação Mínima: Esta rotação virtual é utilizada quando a rotação real é menor que a rotação mínima definida;
- Resolução: Este valor determina com qual periodicidade (quantos graus em cada tempo) uma nova média será calculada. Note que a rotação máxima admissível que é permitida depende deste valor porque a rapidez do cálculo é determinada pela taxa de atualização global.
O valor teórico é derivado por: Rotação máxima = resolução * taxa de atualização global / 6
Por motivos práticos você deve usar valores que abranjam somente até 10 ou 20% desta rotação máxima teoricamente possível.
Resolução | A rotação máxima teórica a uma taxa de atualização global de 19.200 Hz | A rotação máxima teórica a uma taxa de atualização global de 38.400 Hz |
1° | 3200 rpm | 6400 rpm |
2° | 6400 rpm | 12,800 rpm |
4° | 12,800 rpm | 25,600 rpm |
6° | 19,200 rpm | 38,400 rpm |
8° | 25,600 rpm | 51,200 rpm |
Os seguintes múltiplos da rotação são suprimidos dependendo da largura de janela:
Largura de janela | Múltiplos |
90° | 4, 8, 12, … |
120° | 3, 6, 9, … |
180° | 2, 4, 6, … |
360° | 1, 2, 3, … |
720° | 0.5, 1, 1.5, … |
Observação: Se um dos sinais fonte for inválido, o sinal de saída também será inválido.
CASMA em funcionamento
Observe no gráfico o sinal de torque não filtrado (vermelho), e o sinal de torque filtrado utilizando o CASMA (verde).
Pode-se ver claramente que o filtro CASMA alcança excelente estabilização das medições de torque em correlação com a velocidade do motor, à qual também muda com o tempo. Quanto maior a largura deste filtro, melhores os resultados.






