Geisenheim University has developed a new concept for mechanized work on steep slopes: the viticulture robot "Geisi". Geisi shall have the capability to work on slopes of up to 70 percent - remote controlled and without ropes.
Viticulture on steep slopes has shaped the landscape in Germany's wine growing regions. However, the proportion of cultivated steep slopes is steadily decreasing. In 2010, it was down to only 9 percent of the overall area under cultivation. One of the reasons for this is that working these steep slopes is completely done by hand - work that is dangerous, physically demanding and costly. The Institute for Technology at Geisenheim University, however, intends to remedy this situation by substantially facilitating the landscape-shaping viticulture on steep slopes. A team headed by Professor Schwarz set out to develop a new concept for mechanized work on steep slopes: Geisi.
Unlike earlier equipment for mechanized cultivation, Geisi is designed to work remotely and without ropes on slopes with grades up to 70 percent. This leads to significant savings in labor cost and at the same a valuable plus in work safety. A fleet of never-tiring, mechanized steep-slope viticulture robots can offer long-term advantages as well with their ability to autonomously perform typical tasks such as crop protection, mulching or foliage work. Geisi is designedto be available at a substantially lower price than earlier mechanized systems built to work on steep slopes.
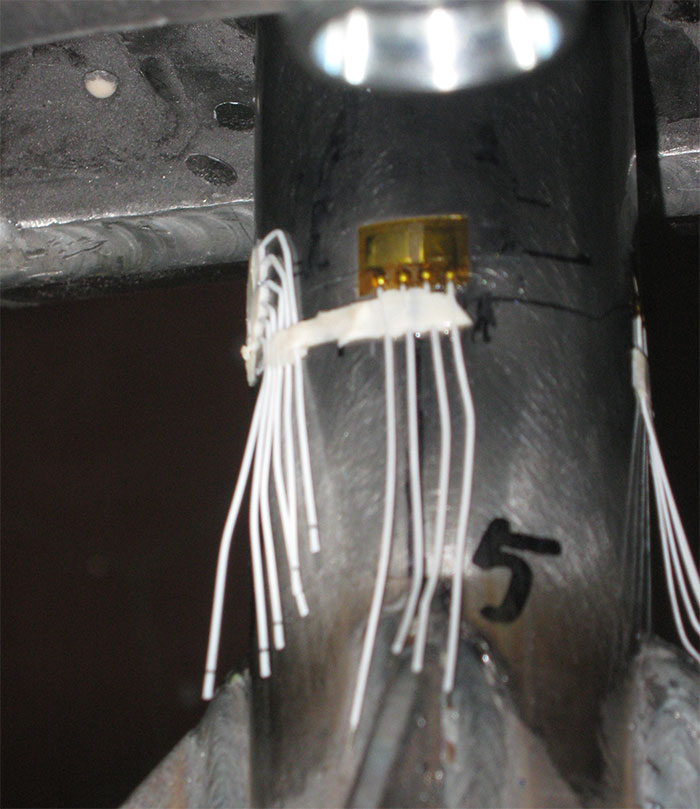
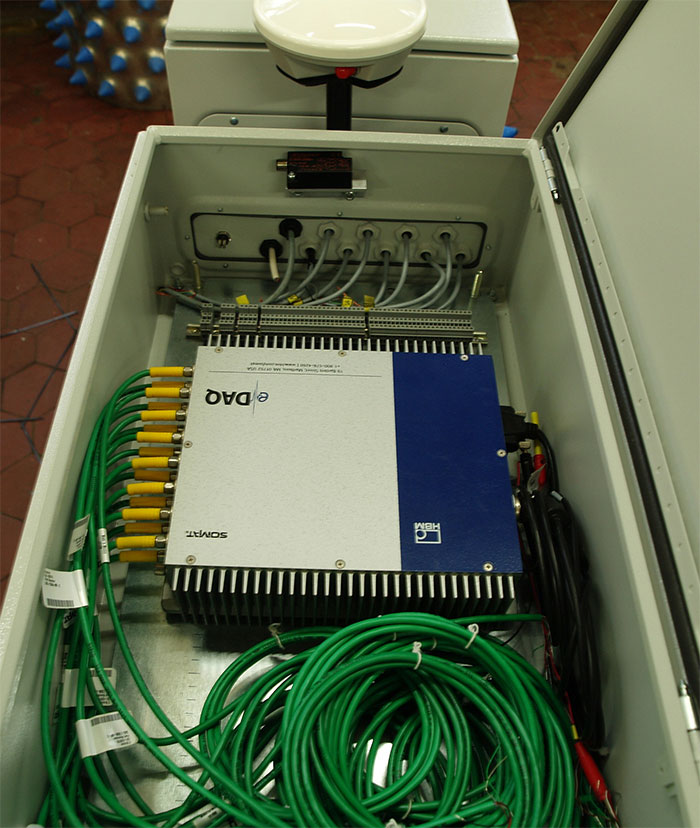
To make these goals a reality, the project managers got HBM on board. Strain gauges and the rugged, mobile Somat eDAQ data acquisition system from the test and measurement expert make an important contribution to enabling Geisi to autonomously and reliably move on steep slopes.