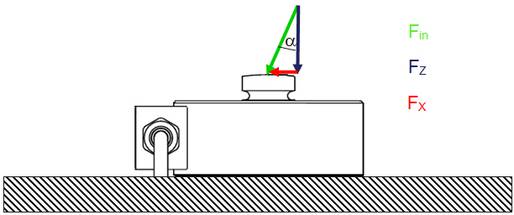
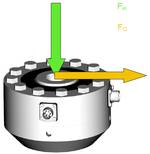
 a. Lateral forces
a. Lateral forces b. Bending moments
b. Bending moments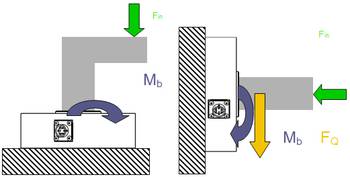


Transducers designed so they are only able to record forces in the pressure direction are generally equipped with a convex fitting for application of the load.
The application of force on the load button can be implemented with the load application aids that are available for many models. These include for example thrust pieces as shown in the sketch below.
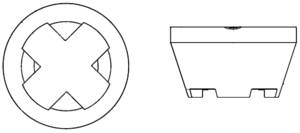
A thrust piece of this type is simply placed on the load application point. Care must merely be taken that there are no extraneous objects between the thrust piece and the force transducer. The thrust piece has a rotating bearing and the angle to the transducer can be changed so that bending moments and torques are not applied to the transducer.
If a force transducer is installed without a thrust piece of this type, the following requirements must be met for the component that comes in contact with the convex force application area:
- HBM recommends a hardness of at least 43 HRC
- The workpiece should be ground
- Mounting must be performed so that the mating component does not lift up and the transducer could be struck by impacts
- If possible the mating component should rotate and have a swivel bearing to prevent bending moments and torques.
Force transducers are generally placed in the structure for their application. This means that the force is directed into the structure under the force transducer. However, horizontal mounting is also conceivable. In this case the transducer should be rigidly connected with the structure.
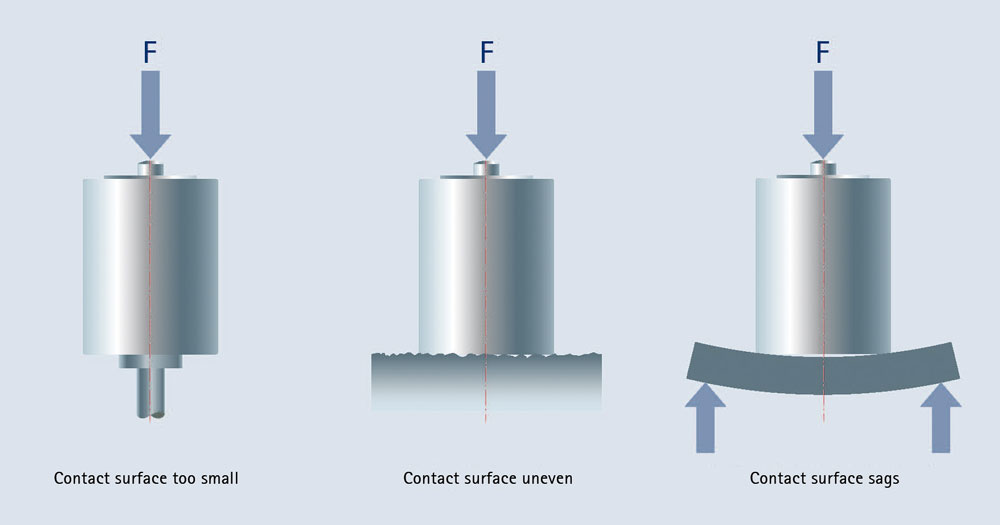
In any case the structural element on which the bottom of the transducer is mounted must be designed so that forces are received with only slight deformation. Sufficient rigidity should be ensured for this purpose.
It is also important for the surface to be even. The maximum tolerable unevenness is 0.005 mm. An even substrate structure ensures that the force transducer will be deformed in the way that is required to achieve the manufacturer's full measurement accuracy.
The substrate structure should be resistant to deformation and must have a larger diameter than the force transducer. A substructure that results in significant deformation, too small a surface or unevenness in the application of force will lead to states of deformation that were not taken into consideration in the design of the transducer. Technical data related to sensitivity, linearity and hysteresis may therefore change.