Termes et expressions spécifiques aux capteurs de couple
Classe de précision
La classe de précision annoncée pour les capteurs de couple HBM signifie que certaines valeurs d’erreurs spécifiques exprimées en pourcent seront toujours inférieures ou égales à cette valeur. La tolérance de sensibilité n’est pas prise en compte.
La classe de précision inclue les caractéristiques mécaniques détaillées ci-dessous
- Erreur de linéarité y compris hystérésis (dlh)
- Erreur relative standard de reproductibilité (σrel)
- Effet de la température (par 10° K) sur le signal de zéro (TK0)
- Effet de la température (par 10° K) sur la sensibilité (TKc)
Pour les capteurs ayant deux ou plusieurs signaux de sortie (fréquence et tension), c’est la sortie exprimée avec la meilleure précision qui est prise en compte pour la détermination de la classe de précision. La classe de précision ne doit pas être confondue avec la classification selon DIN 51309 ou EA-10/14.
Classe de précision ou précision globale
La classe de précision fournit une indication pratique sur les différents types de produits de la gamme HBM. Dans la pratique, elle ne doit pas être confondue avec la précision globale où de multiples facteurs agissent en même temps.
Exemple:
Considérons deux versions de couplemètre à brides T10F:D’un coté, option "S" (version standard) de l’autre coté, option "G" (Erreur de linéarité/hystérésis réduite.) dans les deux cas une capacité nominale de 100 Nm à 10 kNm.
Dans la notice technique on relève les valeurs maximum suivantes pour la version "S": 0.05 % pour l’effet de la température sur le signal de zéro (TK0), 0.1 % pour l’effet de la température sur la sensibilité (TKC), et ±0.1 % pour l’erreur de linéarité/hystérésis (dlh). A cause de ces deux valeurs, la classe de précision indiquée est de 0,1. La version "G", offre par contre une linéarité/hystérésis (dlh) améliorée de seulement 0,05%.
L’effet de la température sur la sensibilité (TKC) est toujours de 0,1% et c’est donc l’erreur la plus grande indiquée. en pourcent parmi celles prises en compte. C’est pourquoi la classe de précision de la version "G" reste donnée à 0.1%.
Apparemment, la version "G" n’apporterait donc pas de bénéfice. Cependant on note que l’effet le plus pénalisant ne porte que sur une valeur caractéristique le TKc. En plus c’est la seule erreur qui soit donnée par rapport à la valeur lue. Son influence sera donc considérablement réduite par exemple lors de mesures sur des gammes intermédiaires ou sur des portions d’échelle.
Sensibilité C
C’est l’écart entre la valeur du signal de sortie au couple nominal et le couple à zéro. Normalement HBM indique deux sensibilités distinctes, une dans le sens horaire, l’autre pour le sens anti-horaire.
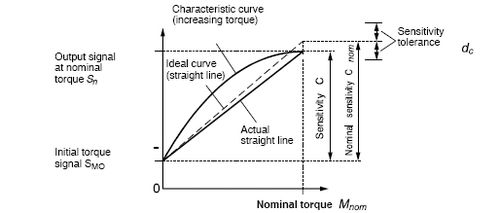
Fig. 1: Sensibilité et couple nominal
La sensibilité C caractérise la pente caractéristique de la courbe. La courbe caractéristique est déterminée comme la ligne droite reliant le signal de sortie SM0 déterminé (le capteur de couple est monté mais ne subit aucune charge = signal initial de couple) et le signal de sortie Sn au couple nominal déterminé par valuers croissantes. Cela donne l'équation simple
C = Sn − SM0
La sensibilité et le couple nominal forment une paire de valeurs connues combinant un couple donné et l’étendue du signal de sortie correspondant.
Ces deux valeurs permettent de paramétrer l’amplificateur. Habituellement, la deuxième paire de valeurs nécessaire est la valeur de couple nul et le signal de sortie correspondant à zéro (c.-à-d. le signal de sortie = signal initial de couple).
Sensibilité nominale
La valeur nominale caractérisant la sensibilité du capteur. Habituellement elle est égale pour le couple dans le sens horaire et dans le sens anti-horaire.
La sensibilité nominale est une valeur caractérisant le type du capteur pour une capacité donnée. La sensibilité réelle de chaque capteur sera égale à la sensibilité nominale assortie des tolérances indiquées.
Tolérance de sensibilité
Ecart autorisé de la sensibilité réelle à la sensibilité nominale. Elle est donnée en pourcentage de la sensibilité nominale.
Pour les capteurs de couple HBM la sensibilité réelle de chaque capteur est déterminée à la livraison. La valeur est documentée dans le certificat d'essai ou le certificat de calibrage. Pour cette raison la tolérance de sensibilité n'est pas prise en compte dans la détermination de la classe de précision.
Effet de la température
Effet de la température sur la sensibilité
L'effet de la température sur la sensibilité est la variation du signal de sortie réel dû à un changement de 10 K de la température déterminée aucouple nominal et liée à la sensibilité. La valeur indiquée est l’erreur maximum se produisant dans le domaine nominal de température.
L'effet de la température sur la sensibilité (également appelée coefficient de température de la sensibilité) est une mesure de l'effet de la température sur le signal de sortie avec une charge appliquée au capteur. En déterminant cette valeur, le signal de sortie doit être corrigé en soustrayant le signal initial de couple à la température correspondante. La température doit être stable.
La température significative est la température de capteur. HBM définit un état stable de la température quand la variation de température maximale d'une période 15 minutes n'excède pas 0,1 K. la valeur de l’écart est donnée en pourcentage de l'étendue réelle du signal de sortie au couple appliqué correspondant (en cas du chargement au couple nominal, c'est la sensibilité).
L'effet de la température sur la sensibilité a comme conséquence un changement de la pente de la courbe caractéristique (voir la fig. 2). Il est particulièrement à prendre en compte quand un capteur est utilisé à une température éloignée de manière significative de la température de référence. Cependant, pour les essais à charge partielle, il n’a que peu d'effet parce que la déviation résultante agit toujours comme un pourcentage de l’étendue réelle du signal de sortie.
Veuillez noter que normalement l'effet de la température sur la sensibilité et l'effet de la température sur le zéro (TK0) sont superposés l'un sur l'autre.
Exemple:
Considérons un capteur de couple de couple nominal 1 kNm., l'effet de la température sur la sensibilité indiqué dans la notice technique est TKC de 0,1 %, la température de référence est de 23 °C et le domaine nominal de température +10 °C à +60 °C.
Si le capteur est utilisé à une température de 33 °C (ou de 13 °C), la déviation de sensibilité due à la variation de la température peut s'élever jusqu'à 0,1 %.
Pour un couple de 1 kNm (couple nominal) ceci amène un écart en valeur affichée de 1 Nm. Cependant, pour un couple de 200 Nm, l’écart n’est que de 0,2 Nm seulement, puisque le TKC est toujours une erreur en pourcentage se rapportant à l'étendue réelle du signal de sortie. C'est dû au fait que la sensibilité est désignée sous le nom de la mesure de la pente de la ligne droite. Employer le même capteur à 43 °C (déviation de 20 ° de la température nominale) peut avoir comme conséquence une erreur maximum de 0,2 % dans le plus mauvais des cas. Ceci ne s'applique pas à l'utilisation à 3 °C, puisque cette température n'est plus dans le domaine nominal de température.
Effet de la température sur le signal de zéro
L'effet de la température sur le signal zéro est la variationdu signal de sortie du capteur sans charge, due à un changement de la température10°, rapporté à la sensibilité nominale.
La valeur indiquée est le maximum se produisant dans le domaine nominal de température.
L'effet de la température sur le signal zéro (également appelé le coefficient de la température du signal zéro) est déterminé en mesurant la variation du signal de sortie réel du capteur sans charge à couple nul, due à un changement de la température 10°K après rétablissement d'un état stable de la température. La température significative est la température de capteur. Un état stable de la température est défini par HBM quand la variation de température maximale au cours d'une période 15 minutes n'excède pas 0,1 °.
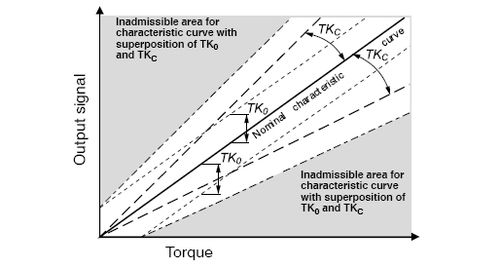
Fig. 2: Effet de la température sur la sensibilité TKC et sur le zéro TK0.
L'effet de la température sur le zéro a comme conséquence un glissement parallèle de la courbe caractéristique (voir la fig.2). Il est particulièrement à prendre en compte quand un capteur est utilisé à une température éloignée de manière significative de la température de référence. L'équilibrage du zéro par tarage ou la compensation du zéro à la température de fonctionnement, peut éliminer l'erreur de mesure due à l'effet de la température sur le zéro.
Veuillez noter que normalement l'effet de la température sur le zéro et l'effet de la température sur la sensibilité (TKC) sont superposés l'un sur l'autre.
Exemple:
Considérons un capteur de couple ayant un couple nominal de 1 kNm, effet de la température sur le zéro indiqué dans la notice technique TK0 ≤ 0.05 %, température de référence 23 °C et domaine nominal de température +10 °C à +60 °C.
Si le capteur est utilisé à une température de 33 °C (ou de 13°C), la déviation de signal zéro peut s'élever à 0,05 % de la sensibilité nominale. Ceci correspond à une déviation en valeur affichée de 0,5 Nm. Cette déviation est indépendante du couple avec lequel le capteur est chargé. Employer le capteur à 43 °C peut avoir comme conséquence une déviation maximum de 0,1 % dans le plus mauvais des cas. Ceci ne s'applique pas à l'utilisation à 3 °C, puisque cette température n'est plus dans le domaine nominal de température.
Erreur de linéarité
Valeur absolue de l’écart maximum entre la courbe caractéristique d'un capteur de couple déterminée par valeurs montantes à la ligne droite de référence qui rapproche la courbe caractéristique d’une ligne droite idéale. La valeur indiquée est exprimée en pourcentage de la sensibilité C.
Pour déterminer l’erreur de linéarité, une série de mesures est prise par charges montantes jusqu’ au couple nominal. La ligne droite de référence est la meilleure ligne droite passant par zéro, telle que les écarts maximums entre la courbe et la droite soient répartis de manière équivalente de chaque coté. (voir la fig. 3). L’erreur indiquée de linéarité est l’écart maximum du signal de sortie réel à la ligne droite de référence. Elle peut également être décrite comme la moitié de la largeur de la bande de tolérance qui est symétrique à la ligne droite de référence.
L’erreur de linéarité doit être prise en compte parce qu'habituellement, lors du paramétrage de la chaîne de mesure, l’ajustement est assuré sous forme de ligne droite. Elle prend l'effet maximum quand un capteur est employé sur une grande plage de mesure, en cas le plus extrême du couple nul jusqu' au couple nominal.
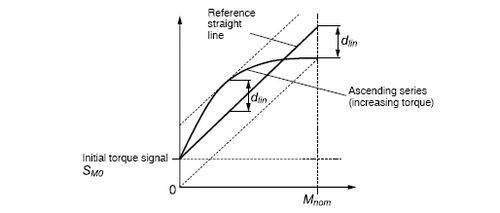
Fig. 3: Détermination de l'erreur de linéarité
Erreur de linéarité y compris hystérésis
L’erreur de linéarité y compris l'hystérésis indique l’écart maximum (rapporté à la valeur absolue) de la valeur du signal de sortie à la ligne droite de référence. La ligne droite de référence est la meilleure droite passant par zéro (voir la fig. 5). Ainsi, l’écart de linéarité et l'hystérésis sont pris en compte. La valeur indiquée est exprimée en pourcentage de la sensibilité C.
Le cycle de chargement pour déterminer l’erreur de linéarité y compris l'hystérésis comprend le chargement du capteur de zéro jusqu' au couple nominal et au retour vers le bas au couple nul (voir la fig. 5). La ligne droite de référence est la meilleure droite passant par zéro, telle que les écarts maximums entre la courbe et la droite soient répartis de manière équivalente de chaque coté
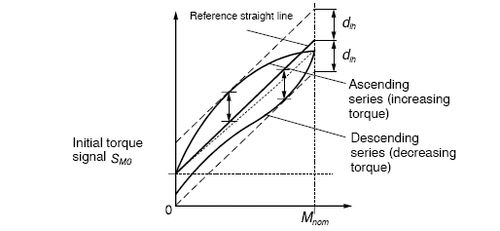
Fig. 5 Détermination de l'erreur de linéarité y compris l'hystérésis dlh par un cycle de chargement
L’erreur de linéarité y compris hystérésis peut également être interprétée comme la moitié de la largeur de la bande de tolérance symétrique à la ligne droite de référence (voir la fig. 5). La seule différence au procédé pour la détermination de l’erreur de linéarité dlin est que le cycle de chargement inclut ici également les mesures par couple décroissant. Cette différence prend effet sur le calcul de la ligne droite de référence et des écarts à la ligne droite de référence.
Pour déterminer cette valeur, HBM procède comme décrit ci-dessous:
- Le capteursubit trois précharges à 100 % du couple nominal dans le sens anti-horaire et retour à couple nul. Le but de cette précharge est d'éliminer les influences du montage comme l'arrangement des boulons et de lisser des surfaces de contact
- Un cycle de chargement pas par pas au couple et l'enregistrement des valeurs de mesure dans le sens anti-horaire aux charges prédéfinies (lors de la production chez HBM, ces pas de couple sont 0 %, 50 %, 100 %, 50 % et 0 % de Mnom :)
- Le capteur subit trois précharges à 100 % du couple nominal dans le sens horaire et retour à couple nul
- Un cycle de chargement pas par pas au couple et l'enregistrement des valeurs de mesure dans le sens horaire aux charges prédéfinies
- La meilleure droite est calculée selon la définition ci-dessus, séparément pour le couple dans le sens horaire dans le sens anti-horaire
- L’écart maximum à la meilleure droite est déterminé séparément pour le couple dans le sens horaire et dans le sens anti-horaire
L’erreur de linéarité doit être prise en compte parce qu'habituellement, lors du paramétrage de la chaîne de mesure, l’ajustement est assuré sous forme de ligne droite. Elle prend l'effet maximum quand un capteur est employé sur une grande plage de mesure, en cas le plus extrême du couple nul jusqu' au couple nominal.
Exemple:
Considérons un capteur de couple T10FS dont l’erreur de linéarité y compris l’hystérésis dlh maximum est donnée pour 0,05 % et les sensibilités nominales de 5 kHz. Si la chaîne de mesure a été ajustée de façon optimale, l'erreur du signal de sortie due à l’erreur linéarité/l'hystérésis peut s'élever au plus à 2,5 hertz.
Erreur relative de réversibilité
L'erreur relative de réversibilité est la différence des signaux de sortie obtenue en mesurant le même couple appliqué par valeurs montantes ou descendantes (voir la fig. 4). La valeur indiquée est l’écart maximum (rapporté à la valeur absolue) dans la gamme de mesure.
On l'indique comme un pourcentage de la sensibilité C.
L'erreur relative de réversibilité est une mesure d'hystérésis, c.-à-d., la différence entre les courbes caractéristiques déterminées au couple croissant et décroissant. Pour déterminer l'erreur relative de réversibilité, un cycle de chargement du couple nul au couple nominal et retour est enregistré. Le calcul pratique est basé sur des mesures à un certain nombre de points prédéfinis au cours du cycle de chargement (par exemple 0 %, 50 %, 100 % de Mnom).
L'hystérésis décrit la dépendance du signal de mesure sur l'histoire du chargement du capteur. Il est particulièrement à prendre en compte si un capteur est employé sur de grandes plages de mesure et s’il n’y a pas de déchargement entre l’acquisition de deux points de mesure différents. Le cas le plus extrême est l'utilisation du zéro au couple nominal.
L'effet de l'hystérésis se produisant pendant un cycle partiel de charge est habituellement sensiblement inférieur à l'hystérésis pendant un cycle de charge couvrant toute la gamme nominale de couple
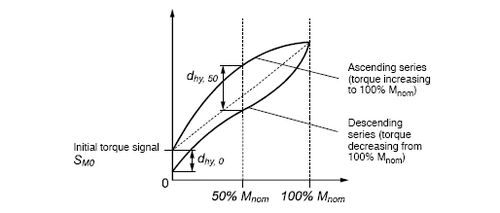
Fig. 4: Détermination de l'erreur relative de réversibilité dhy relevée sur un cycle de charge (basée ici sur des pas de 0 %, 50 %, 100 % Mnom). La valeur à indiquer est l'erreur maximum de réversibilité aux charges données (ici dhy,0 et dhy,50)
Erreur relative standard de répétabilité
La répétabilité décrit la propriété du signal de sortie à donner les mêmes mesures au même couple mesuré plusieurs fois. Pendant les mesures, la position de montage du capteur de coupledemeurera inchangée et le capteur de couple ne sera pas démonté ou remonté (états de répétition). L'écart type indique la déviation moyenne entre toutes les mesures du même couple mesuré plusieurs fois.
L'écart type relatif de la répétabilité est une mesure de la répétabilité selon la DIN 1319. Il est défini comme l’écart type de répétabilité selon la DIN 1319 et est exprimé comme un pourcentage de la gamme de l'étendue de signal couverte pendant la procédure d'essai. C'est une mesure statistique des écarts aléatoires de mesure. Pour cette raison, toutes ces conditions sont gardées constantes, si cela n’était pas le cas, cela conduirait à des variations systématiques de mesure (conditions de répétition de la DIN 1319).
La détermination relative de l'écart type de la répétabilité est un essai standard effectué sur un système statique de calibrage comme suit:
- Le capteur de couple est préchargé au couple nominal. Le signal de mesure S1,100% est pris au couple nominal
- La charge est réduite à 50 % de la charge nominale. Le signal de mesure S1,50% est pris à la moitié du couple nominal
- Alternances entre 50 % et 100 % de couple nominal. Les signaux de mesure Si,50% et Si,100% sont pris jusqu'à ce que 10 valeurs mesurées chacune soient disponibles pour chaque couple
- L’équation ci-dessous est employée pour calculer l'écart type relatif (dans la terminologie mathématique, l'écart type empirique d'un échantillon aléatoire) pour chaque couple et pour le relier à l’étendue du signal de sortie:
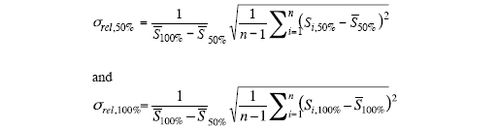
avec n = 10 étant le nombre de mesures pour les couples appliqués respectivement (50 % ou 100 %) et la moyenne arithmétique des signaux de mesure selon

- La notice technique indique la plus petite des deux valeurs σrel,50% et σrel,100%.
Exemple:
HBM indique l'écart type de la répétabilité pour son capteur de couple T10F: σrel ≤ 0,03%. Cette valeur se rapporte à l'étendue du signal de sortie entre les valeurs du couple appliqué. Par exemple, pour un couple nominal de 1 kNm, ceci correspond à une étendue de 500 N·m selon les conditions d'essai indiquées ci-dessus. Ainsi l'écart type de la répétabilité s'élève dans ce cas à ≤ 0,15 N·m.
Dans l'exemple suivant la répétabilité (indiquée quantitativement par l'écart type de répétabilité σrel) est d’une particulière importance pour l'utilisateur. Un banc d'essai pour des moteurs à combustion interne est employé pour des mesures dans le but de comparer différents dispositifs de circuits de pilotage du moteur. Le support et les conditions d’ambiance du capteur de couple restent sans changement. L’historique des chargements pour les différentes séries de mesure est identique. Dans ces mesures les différences entre les valeurs de couple de la série d'essai individuel sont plus importantes que les valeurs de couple absolues. Dans ces circonstances, la contribution du capteur de couple à l'incertitude de ces différences est donnée par sa répétabilité
Charges limites
Vitesse nominale de rotation
La vitesse de rotation nominale est la limite supérieure de la gamme de vitesse à partir de zéro. Elle s'applique dans le sens horaire et dans le sens anti-horaire
Couple nominal
Le couple nominal Mnom est le couple définissant la limite supérieure de la gamme dans laquelle les tolérances des propriétés de capteur ne sont pas dépassées.
Couple maximum de service
Le couple maximum de service est la limite supérieure de la gamme dans laquelle il y a une relation non ambiguë entre le signal de sortie et le couple. Dans cette zone, si le couple mesuré dépasse le couple nominal, les valeurs limites affichées dans les notices techniques peuvent être dépassées.
Si le capteur a été utilisé entre le couple nominal et le couple de service maximum, les valeurs limites indiquées dans les notices techniques seront conservées par le capteur quand il sera de nouveau employé dans des valeurs de couple nominales. Un léger décalage du signal zéro peut se produire, mais ceci n'est pas considéré comme une violation des caractéristiques.
Le capteur de couple peut être employé pour des mesures jusqu'au couple maximum de service, bien que les propriétés de mesure puissent s’y trouver moins favorable. La limite du couple maximum de service peut être donnée par les propriétés électroniques (telles que la gamme de modulation de l'électronique interne d'amplificateur) ou par les propriétés mécaniques (telles qu'un arrêt de surcharge). Dans le cas des capteurs qui n'ont ni l'électronique interne ni la protection mécanique de surcharge, le couple maximum de service et le couple limite sont fréquemment identique.
Couple limite
Le couple limite est le couple jusqu'auquel les capacités métrologiques du capteur ne subiront pas de dommages permanents. Si le capteur a été utilisé entre le couple nominal et le couple limite, les valeurs limites indiquées dans les notices techniques seront conservées par le capteur quand il sera de nouveau employé dans des valeurs de couple nominales. Un léger décalage du signal zéro peut se produire, mais ceci n'est pas considérée une violation des caractéristiques.
En cas d'une charge vibratoire continue, les limites indiquées ci-dessous dans la section sur la largeur de bande passante ont la priorité sur la valeur du couple de limite.
In the event of a continuous vibrating load, the limits discussed below in the section on permissible oscillation bandwidth have priority over the limit torque.
Couple de rupture
Le couple de rupture est le couple qui une fois dépassé peut mener à la destruction mécanique du capteur.
Des valeurs de couple intermédiaires entre le couple limite et le couple de rupture n’entraineront pas de destruction mécanique, mais le capteur peut être endommagé à tel point qu'il sera inutilisable de manière permanente.
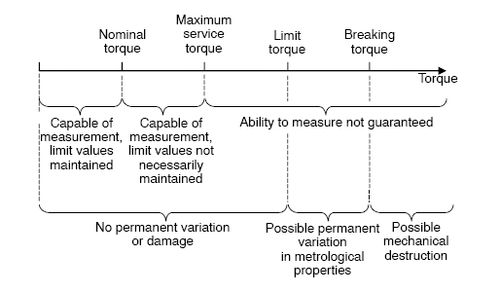
Fig. 6: Charges limites
Amplitude d’oscillation autorisée
L’amplitude d’oscillation autorisée est l'amplitude d'oscillation d'un couple variable sinusoïdal auquel le capteur peut être soumis 10⋅106 cycles sans causer aucune variation significative de ses propriétés métrologiques.
L'amplitude est désignée par la valeur crête / crête, c.-à-d., comme différence entre le couple maximum et minimum. Voir aussi la fig. 7.
De même que l’amplitude d’oscillation autorisée, il est également nécessaire de définir une limite supérieure autorisée pour le couple. Cette limite supérieure coïncide habituellement avec le couple nominal (dans la direction positive et négative). Des valeurs qui diffèrent de celles-ci sont explicitement indiquées dans les caractéristiques.
Le concept a été extrait de la DIN 50100, qui traite des essais de vibration continue (essais de fatigue) dans le cadre des essais de matériaux, et adapté au couple à partir de la contrainte mécanique. Seul le nombre de cycles de vibration est facteur significatif pour quantifier la contrainte de fatigue. La fréquence n'est pas significative dans les niveaux de fréquence habituellement vus en process* mécanique). Selon la DIN 50100, pour le cas des aciers, on note une corrélation étroite entre la tenue en fatigue garantie sous une charge donnée d'un composant mécanique et le nombre de 10.106 cycles qu’il supporte à cette charge.
Dans le cas du chargement vibratoire, la limite de couple supérieure remplace les informations explicites sur le chargement vibratoire moyen. Dans le domaine défini par les limites positives et négatives, le couple pulsé ou le couple alterné sont autorisés (voir la fig. 7).
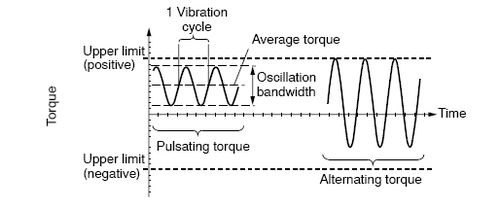
Fig. 7: Termes utilisés en mode de mesures vibratoires
----------
*) voir aussi: H.-J. Bargel, G. Schulze: Werkstoffkunde (Materials Science), VDI-Verlag GmbH, Düsseldorf, Germany 1988
Charges parasites
Force axiale limite
La force axiale limite est la force longitudinale maximum autorisée (ou force axiale), définie telle que Fa dans fig. 8. Si cette force axiale limite est dépassée, le capteur peut être endommagé de manière permanente.
Dans les capteurs de couple HBM la force axiale limite fixe une limite supérieure au domaine de mesure. Les capteurs de couple peuvent être employés pour la mesure si les forces axiales n'excèdent pas la force axiale limite. Cependant, il peut y avoir un certain effet sur le signal de mesure. On donne séparément la limite supérieure de cette influence dans les notices techniques.
La force axiale autorisée doit être inférieure à la force axiale limite indiquée si un autre effort parasite se produit (tel qu’un moment de flexion, une force latérale ou un dépassement du couple nominal). Dans ce cas, les valeurs limites doivent être réduites. Par exemple, si le capteur subit un moment de flexion 30 % du moment de flexion limite et une force latérale de 30% de l’effort latéral limite, la force axiale limite autorisée sera seulement de 40 % de la valeur limite indiquée, si le couple nominal n’est pas dépassé. Si les charges parasites sont des charges vibratoires continues, les largeurs de bande de vibration autorisées peuvent différer des charges limites.
Force latérale limite
La force latérale limite est la force latérale maximum autorisée (force radiale), définie telle que Fr fig. 8. Si la force latérale limite est dépassée, le capteur peut être endommagé de manière permanente.
Dans les capteurs de couple HBM, la force latérale limite fixe une limite supérieure au domaine de mesure. Les capteurs de couple peuvent être utilisés si les forces latérales ne dépassent pas la force latérale limite. Cependant, il peut y avoir un certain effet sur le signal de mesure. On donne séparément la limite supérieure de cette influence dans les notices techniques.
La force latérale autorisée doit être inférieure à la force latérale limite indiquée si un autre effort parasite se produit (tel qu’un moment de flexion, une force latérale ou un dépassement du couple nominal). Dans ce cas, les valeurs limites doivent être réduites. Par exemple, si le capteur subit un moment de flexion 30 % du moment de flexion limite et une force axiale de 30% de l’effort axial limite, la force latérale limite autorisée sera seulement de 40 % de la valeur limite indiquée, si le couple nominal n’est pas dépassé. Si les charges parasites sont des charges vibratoires continues, les largeurs de bande de vibration autorisées peuvent différer des charges limites.
Moment de flexion limite
Le moment de flexion limite est le moment de flexion maximum autorisé , défini tel que Mb fig. 8. Si le moment de flexion limite est dépassé, le capteur peut être endommagé de manière permanente.
Dans les capteurs de couple HBM,le moment de flexion limite fixe une limite supérieure au domaine de mesure. Les capteurs de couple peuvent être utilisés si moments de flexion ne dépassent pas le moment de flexion limite. Cependant, il peut y avoir un certain effet sur le signal de mesure. On donne séparément la limite supérieure de cette influence dans les notices techniques.
Le moment de flexion autorisé doit être inférieure au moment de flexion limite indiqué si un autre effort parasite se produit (tel qu’une force radiale, une force latérale ou un dépassement du couple nominal). Dans ce cas, les valeurs limites doivent être réduites. Par exemple, si le capteur subit une force radiale 30 % de la force radialelimite et une force axiale de 30% de l’effort axial limite, le moment de flexion limite autorisé sera seulement de 40 % de la valeur limite indiquée, si le couple nominal n’est pas dépassé. Si les charges parasites sont des charges vibratoires continues, les largeurs de bande de vibration autorisées peuvent différer des charges limites.
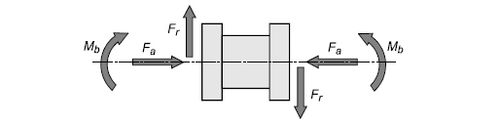
Fig. 8: Charges parasites - Force axiale Fa, Force latérale Fr, Moment de flexion Mb
Températures
Température de référence
La température de référence est la température ambiante à laquelle les caractéristiques du capteur s'appliquent. Pour certaines caractéristiques, certains domaines de température peuvent être spécialement définis.
Domaine de température nominal
Le domaine de température nominal est le domaine de température ambiante dans lequel le capteur peut être utilisé pour tous les usages pratiques et dans lequel les valeurs limites des propriétés métrologiques annoncées dans les notices techniques.sont garanties.
Température de service
Le domaine de température de service est le domaine de température ambiante dans lequel le capteur peut être utilisé sans altération permanente de ses propriétés métrologiques.
Dans le domaine de la température de service, mais en dehors du domaine de température nominale, il n'y a aucune garantie que les valeurs limites des propriétés métrologiques annoncées dans les notices techniques soient maintenues.
Température de stockage
La température de stockage est la température dans laquelle le capteur peut être stocké sans la chargement mécanique, ni électrique sans altération permanentede ses propriétés métrologique.