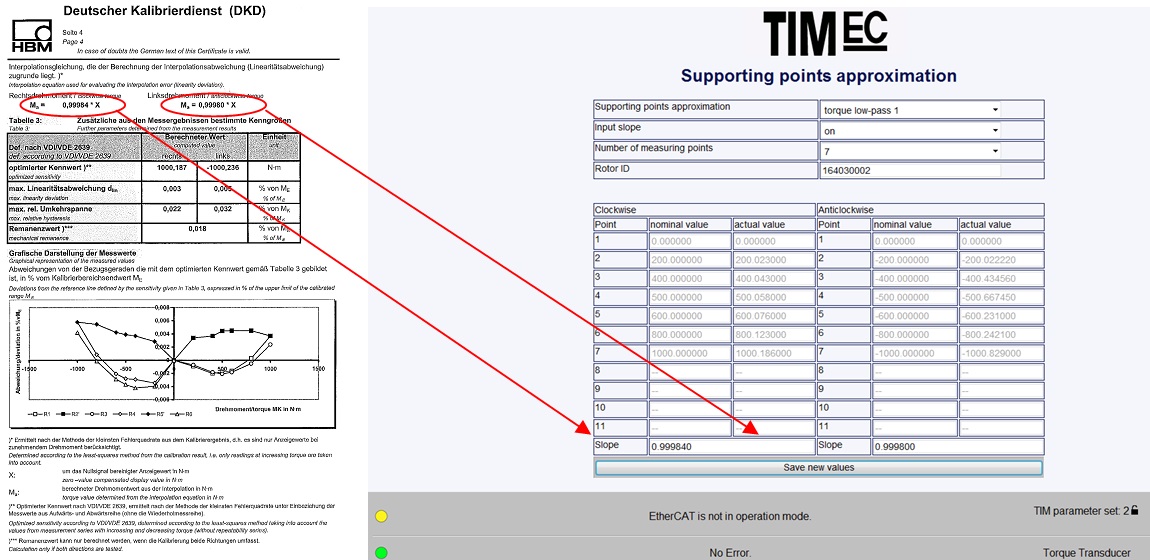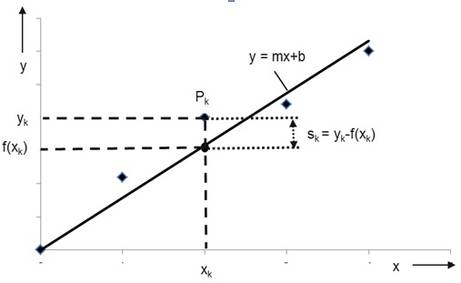
Le module TIM-EC permet la linéarisation et l’approximation de la courbe caractéristique du capteur de couple en employant la méthode de Gauss des moindres carrés comme décrit ci-dessus. La linéarisation permet d’établir la courbe caractéristique du capteur en 11 points d'étalonnage. Les valeurs réelles des points en Nm peuvent être déterminées, par exemple, en réalisant un étalonnage sur site sur le banc d'essai même, à l'aide d'un système bras de levier et masses mortes ou en effectuant une mesure à l'aide d'un capteur de couple de référence. L’étalonnage découle d'une procédure d'étalonnage selon les normes allemandes DIN51309 ou VDI/VDE 2646 et l'équation de linéarisation de la courbe caractéristique y = f (x) peut être directement transférée à partir du certificat d’étalonnage à l'interface Web.
Le grand nombre de points d’étalonnage permet de diminuer les erreurs potentielles de transfert des données et de réduire le temps nécessaire pour les entrer. L'indication du numéro de série du capteur de couple assure une corrélation claire entre le capteur de couple en service et son étalonnage. Quand le capteur de couple est remplacé, le numéro de série est automatiquement scruté et comparé à l'entrée enregistrée correspondant à l’étalonnage. Si le numéro de série et la courbe caractéristique stockée du capteur relié ne coincident pas, alors la courbe caractéristique réellement stockée est automatiquement désactivée et un message d'avertissement apparait.
Ce message est clairement visualisé dans le serveur web connecté grâce à la fonction Traffic light (voir fig. 3). En outre, avec EtherCAT, un drapeau d'erreur se positionne sur le système de contrôle ou d'automation pour une analyse approfondie.