Fonctionnement du système de mesure de vitesse de rotation
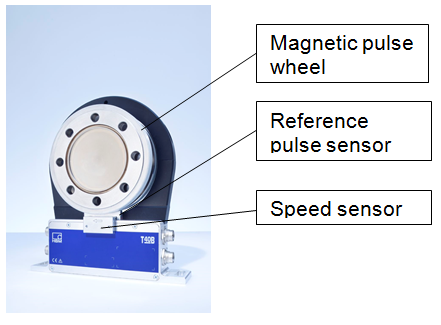
Le support métallique de l’anneau magnétique en plastique est monté sur le second flasque du capteur et il est ainsi entièrement intégré. Cela libère de l'espace et facilite de manière significative l'installation du capteur.
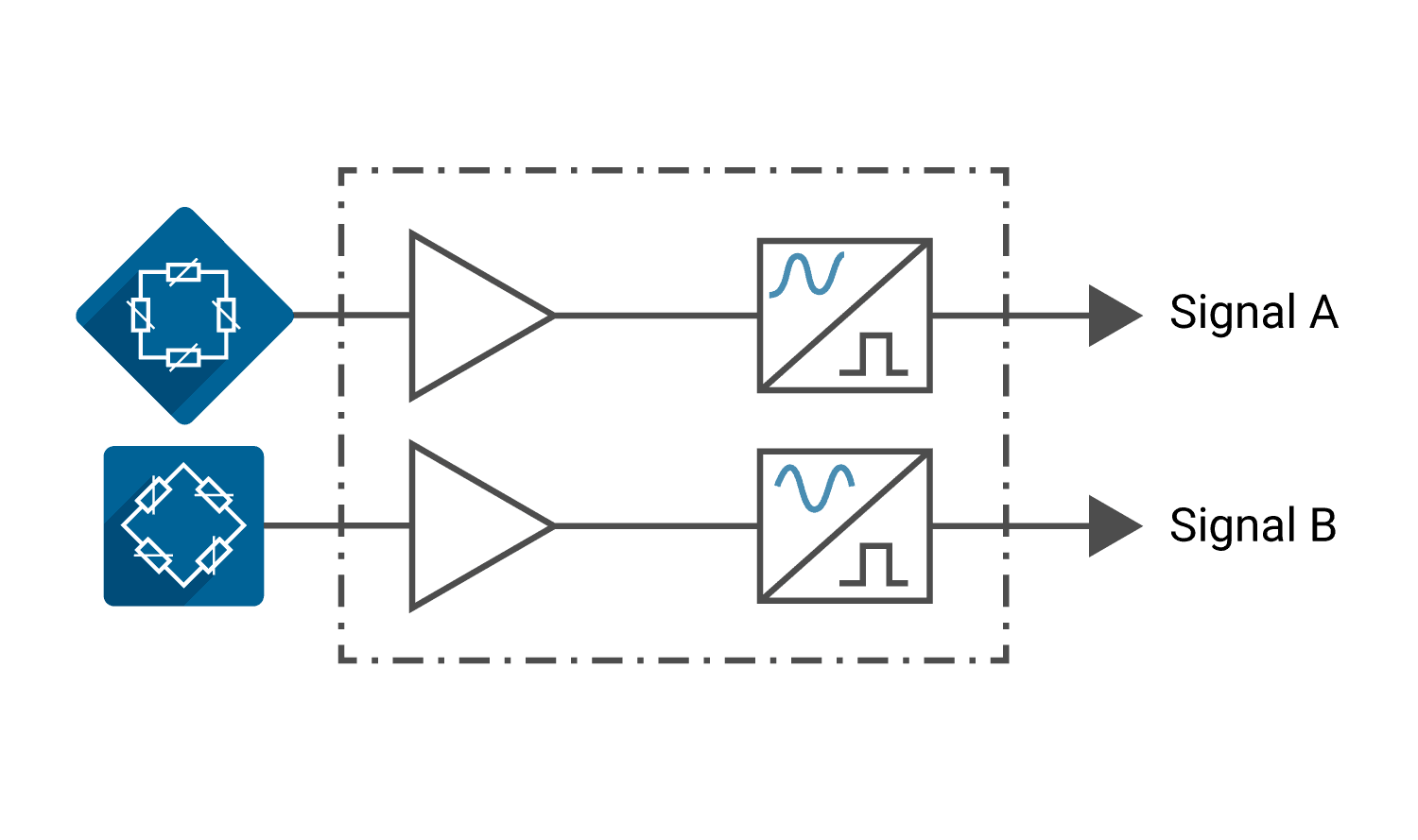
Le système est basé sur le principe de la mesure sans contact des impulsions de la roue magnétique à l'aide d'un capteur magnéto-résistif anisotrope. Quand le capteur est soumis à un champ magnétique, sa valeur de résistance change selon l'angle de magnétisation et la direction du vecteur de la résistance. Le champ magnétique est modulé par le mouvement relatif entre la mesure matérielle et le capteur. Le champ magnétique est sensible dans la direction radiale. Le signal est donc robuste et stable. L'entrefer maximum entre la roue et le et le capteur est de 2.5 mm.
Le système de mesure est très peu sensible au mouvement relatif entre le rotor et le stator qui pourrait résulter des vibrations du banc d'essai.