Réglages pour un rayon....:
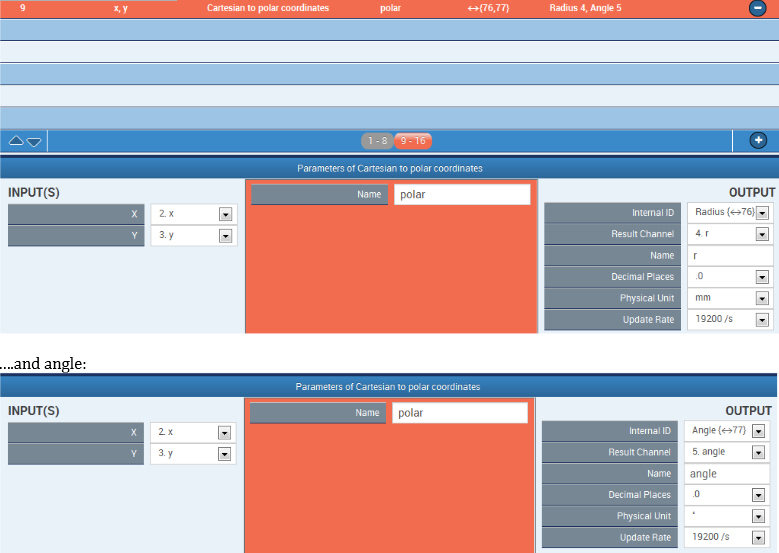
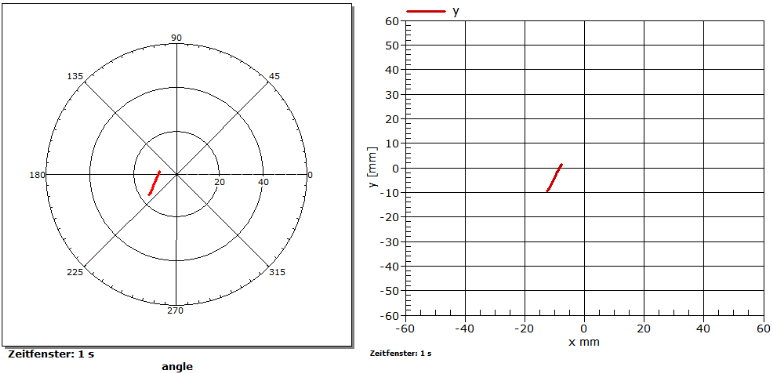
Illustration d'une force variable avec catman dans des coordonnées polaires et cartésiennes:
Mention légale
Ces exemples sont uniquement disponibles à titre d'illustration. Ils ne font l'objet ni d'une garantie ni d'un droit à la garantie.
Introduction
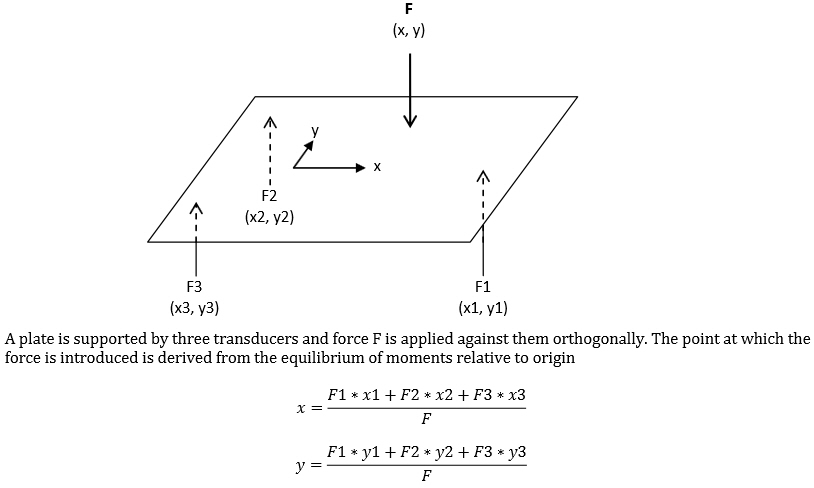
Trois capteurs de force F1, F2, F3 permettent de déterminer facilement les coordonnées d'une force F mesurée.
Procedure
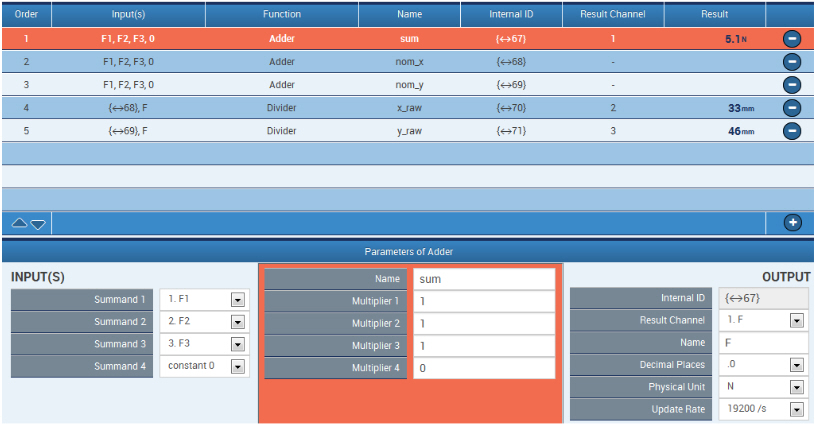
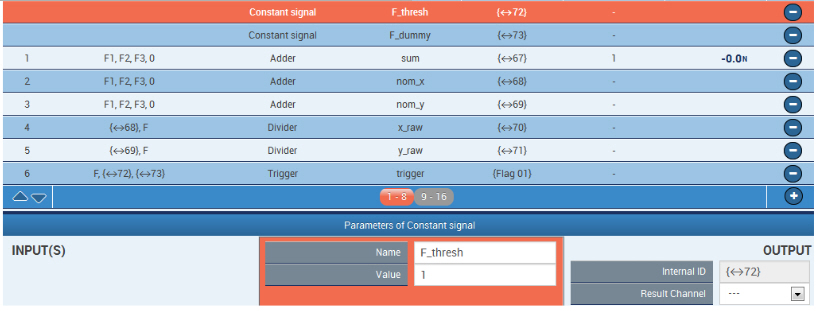
La force F correspond à la somme des diverses forces appliquées :
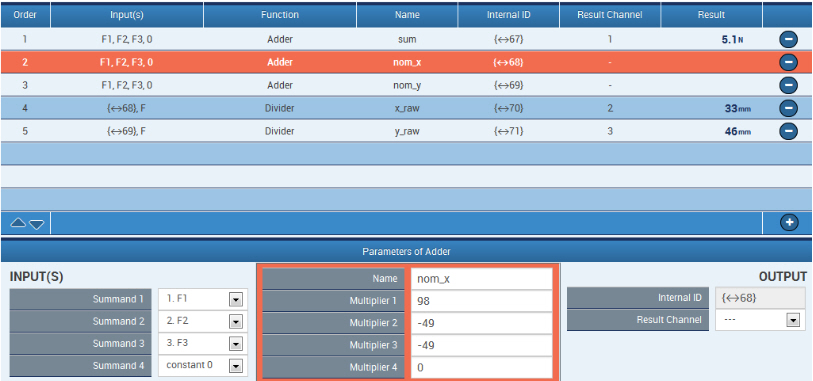
Au cours d'une étape intermédiaire, les valeurs x et y sont déterminées. Les coordonnées x1, y1,x2,.... se trouvent déjà être des facteurs connus.
Pour x:
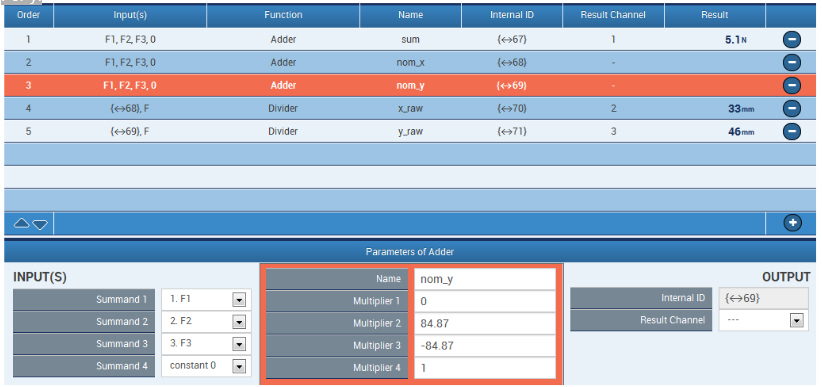
Pour y:
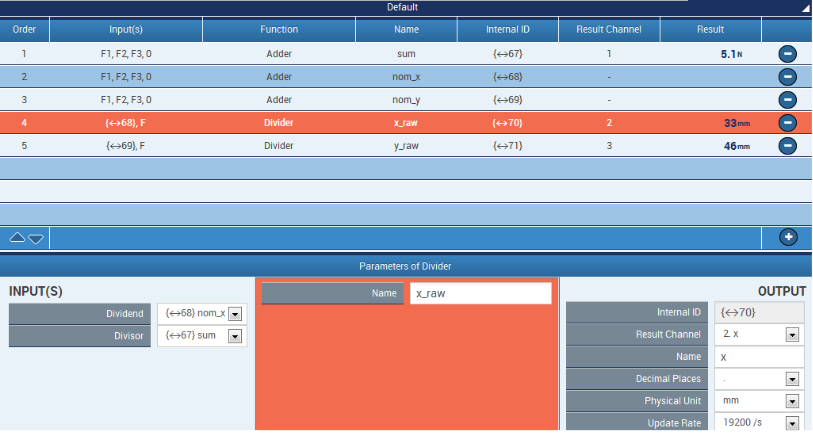
x et y sont finalement calculés à l'aide de 2 divisions. Ici vous pouvez voir le calcul de x (procéder de la même manière pour y) :
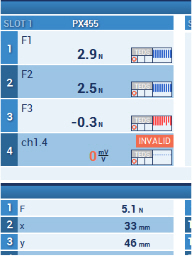
Valeurs invraisemblables sans charge
Si F est quasiment nulle, le bruit prédomine. Les valeurs fournies pour x et y sont alors invraisemblables:
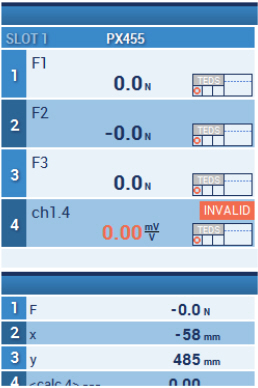
Solution : x et y ne peuvent s'afficher normalement que si F est supérieure à par ex.1 N. Sinon le système indiquera 0.
Un bloc «Trigger» active le Flag_01, lorsque F dépasse la valeur minimale :

Deux valeurs seuils de Trigger. Seul le niveau de commutation inférieur à 1 N est nécessaire. Pour le niveau supérieur, une valeur nettement supérieure à l'étendue de mesure est sélectionnée :

Détermination du point d'introduction d'une force avec PMX
Détermination du point d'introduction d'une force sur une plaque à l'aide de 3 capteurs de force.
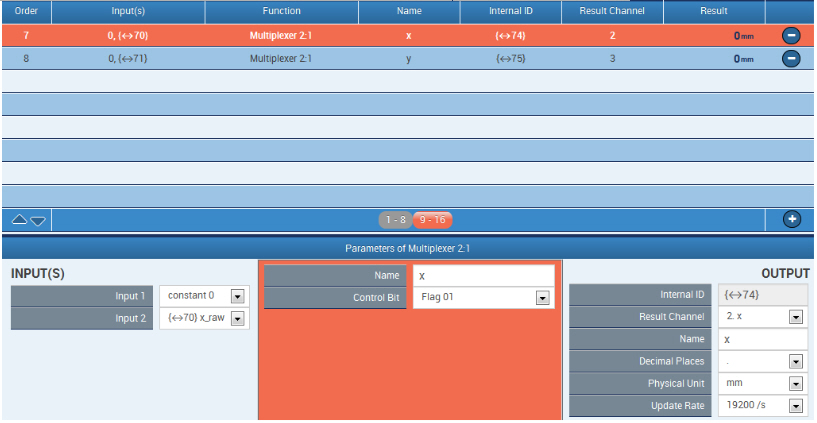
Deux blocs «Multiplexer» commutent pour finir entre zéro et les valeurs calculées. Ici pour x:
Tips
- En cas d'une division par zéro, un bloc «Divisor» fournit un NaN (Not-a-Number).
- Le cas échéant, des coordonnées polaires peuvent aussi être fournies.
