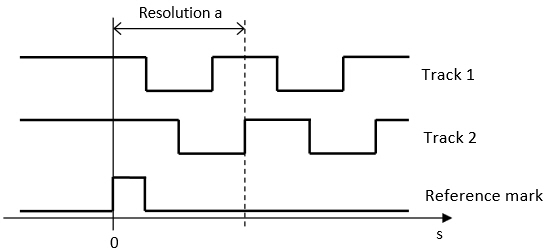
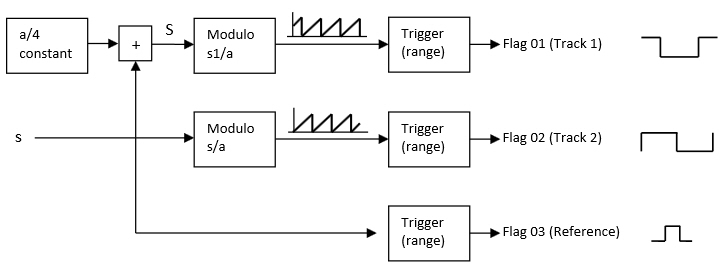
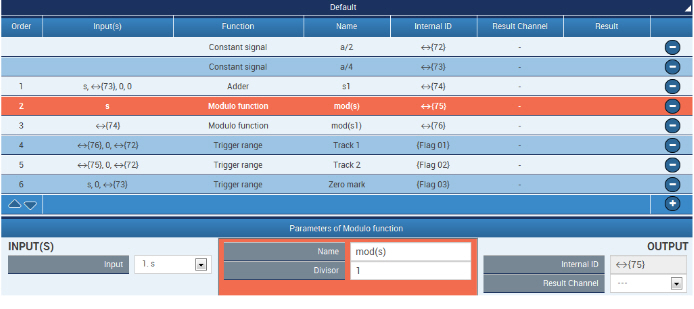
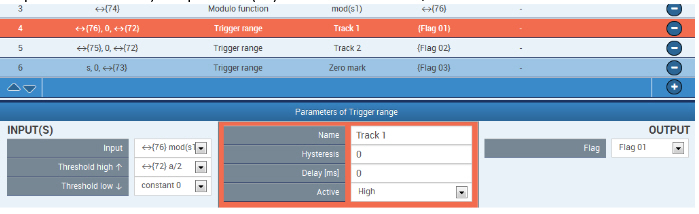
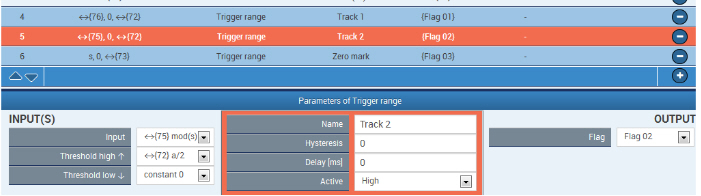
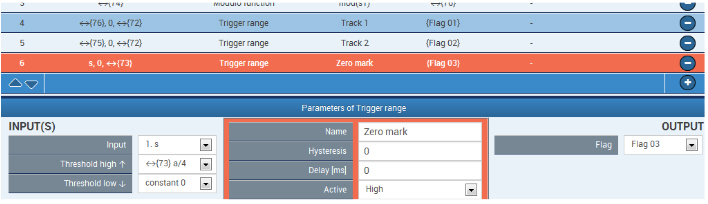
The following digital signals are derived from a signal s:
For example, s is a displacement in mm or an angle in degrees. Resolution a is exactly one period of an output signal; it has the same unit as s.
The method applied does not support negative s values.
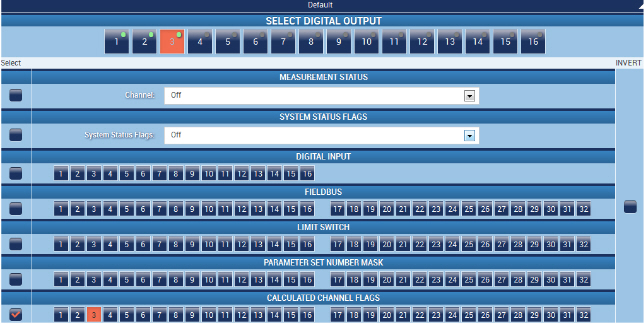
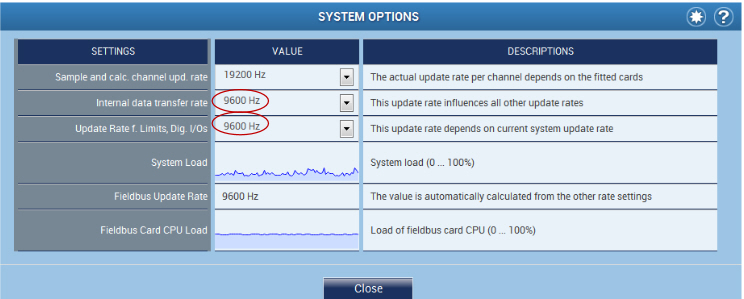
The signals are output via the PX878 plug-in card's digital outputs. The electric properties limit the maximum frequency to approximately 1 kHz.