Drehmoment- und Drehzahlintegration
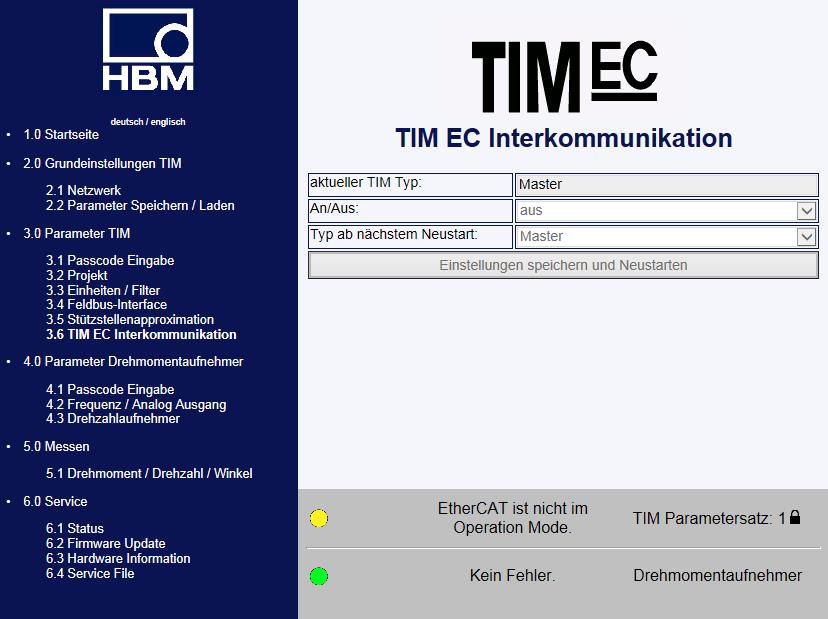
Neben den klassischen Ausgangssignalen wie Frequenz und Spannung besitzen Drehmomentaufnehmer von HBM am Stator auch eine digitale Schnittstelle TMC (Torque Measurement Communication). Damit sind die Drehmomentaufnehmer flexibel einsetzbar. Sie lassen sich sowohl über die klassischen Signale wie Frequenz und Spannung, als auch über moderne Ethernet-basierte Feldbustechnik wie EtherCAT in Automatisierungs- und Steuerungskonzepte integrieren. Dabei erfolgt die Integration über das modulare und hochflexible Schnittstellenkonzept TIM-EC.
Bei TIM-EC handelt es sich um ein zweikanaliges EtherCAT-Schnittstellenmodul. Neben dem digitalen Drehmomentsignal TMC lassen sich auch RS422-kompatible Drehzahlsignale der Drehmomentaufnehmer-Serie T40 anschließen. Folgende Messwerte stehen auf dem EtherCAT-Bus zu Verfügung:
- Drehmoment
- Drehzahl
- Drehwinkel
- Leistung
Die Messwerte Drehmoment, Drehzahl und Leistung können jeweils unabhängig voneinander gefiltert (TP1, TP2) werden. So stehen für die genannten Messgrößen jeweils zwei Messwerte zu Verfügung, welche zyklisch übertragen werden.