Um auch kleinste Widerstandsänderungen zu messen, wurden die Dehnungsmessstreifen als Vollbrücken angeschlossen (siehe Abbildung 2). So kann die Brückendurchbiegung angezeigt werden. Mithilfe von ANSYS Workbench 19.1 wurde die qualitative Dehnung der Dehnungsmessstreifen für die angegebene Kraftrichtung ermittelt.
Entwicklung eines 3-achsigen Kraftsensors auf Basis von HBM-Dehnungsmessstreifen
Wie kann ein passiver und kostenoptimierter sensorischer Fuß für lastentragende Laufroboter entwickelt werden? Diese Forschungsfragestellung wurde im Rahmen eines Robotikprojekts der Abteilung Simulation, Systemoptimierung und Robotik der Technischen Universität Darmstadt angegangen.
Mithilfe von HBM-Dehnungsmessstreifen für Aufnehmer wurde ein 3-achsiger Kraftsensor zur Regelung der Bewegungssteuerung des Roboters entwickelt.
Die Aufgabe:
Entwicklung eines passiven sensorischen Fußes für lastentragende Laufroboter, der kostengünstiger ist als die am Markt erhältlichen Sensoren.
Die Lösung:
Auf Basis von HBM-Dehnungsmessstreifen für Aufnehmer wurde ein 3-achsiger Kraftsensor zur Regelung der Bewegungssteuerung der lastentragenden Laufroboter entwickelt. Eine bereits aufgebrachte Klebstoffschicht sorgte für eine sehr einfache und prozessoptimierte Bearbeitung der DMS mit sehr guten Ergebnissen.
Die Ergebnisse:
12 HBM-Dehnungsmessstreifen für Aufnehmer wurden in Vollbrückenschaltung angeschlossen, um selbst kleinste Widerstandsänderungen zu messen. Die beachtlichen Ergebnisse des ersten Testlaufs werden in einem Folgeprojekt weiter optimiert.
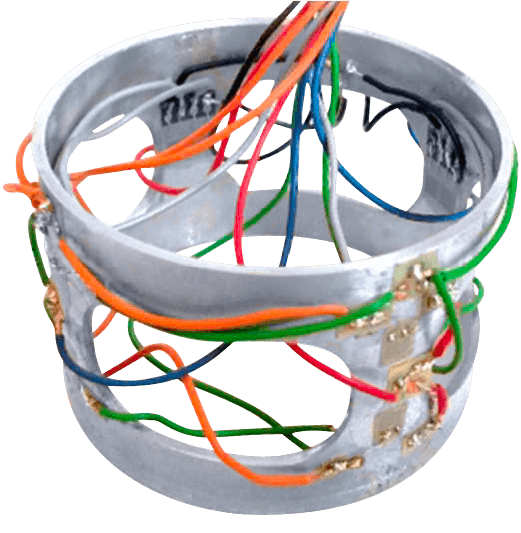
Der Aufbau des 3-achsigen Kraftsensors

Der 3-achsige Kraftsensor basiert auf einem Aluminium-Federkörper-Bauteil in einer zylindrischen Balkenkonstruktion. Dieser Aufbau ist einfach herzustellen und kostengünstig.
Zur Messung der Kräfte in x-, y- und z-Richtung wurden drei DMS-Vollbrücken installiert:
- Messung in z-Richtung: Im Federkörper-Bauteil wurden mit einem kalthärtenden Zweikomponenten-Klebstoff vier Aufnehmer-DMS-Rosetten K-TA11K3/350 installiert.
- Messung in x- und y-Richtung: Außerhalb des Federkörper-Bauteils wurden acht Aufnehmer-DMS K-LU13K1.6/350 angebracht. Aufgrund des Stick-on-Design konnten die Aufnehmer-DMS durch Erwärmen und daher benutzerfreundlich installiert werden.
Die Dehnungsmessstreifen sind wie in Abbildung 1 dargestellt angeordnet. Dehnungsmessstreifen Nummer 1-4 messen in z-Richtung, Dehnungsmessstreifen 5-12 messen in x- und y-Richtung.

Der Testlauf des Prototyps
Zur Prüfung des 3-achsigen Kraftsensors wurde ein Prototyp entwickelt. Dieser Prototyp wurde in einem ersten Testlauf evaluiert und kalibriert. Mithilfe der Kalibriergeräte wird der Federkörper nacheinander in den drei Kraftrichtungen belastet.
Die Kalibrierungsbedingungen für den Ein- und Ausgang waren wie folgt:
| Nullsignal x-Kanal (mV) | 11,42 |
| Nullsignal y-Kanal (mV) | 5,13 |
| Nullsignal z-Kanal (mV) | -28,90 |
| Versorgungsspannung (Gleichstrom in V) | 3,3 |
| Verstärker | ADS1262 |
| Messbereich (V) | +/- 0,156 |
| Verstärkungsfaktor x-Kanal | 16 |
| Verstärkungsfaktor y-Kanal | 16 |
| Verstärkungsfaktor z-Kanal | 16 |

Die Ergebnisse des Testlaufs
Die kalibrierten Messkurven werden in den orangefarbenen, grünen und schwarzen Graphen gezeigt. Als Vergleichswert wird die Referenzkraftmessung ebenfalls dargestellt, in den blauen Graphen.



Mittlere absolute Abweichung vom Referenzsensor und durchschnittlicher relativer Fehler:
| Kraftrichtung | Mittlere absolute Abweichung (N) | Durchschnittlicher relativer Fehler (%) |
| Fx | circa 3 | circa 1.5 |
| Fy | circa 4 | circa 2.6 |
| Fz | circa 23 | circa 3.1 |
Die Ergebnisse des ersten Testlaufs zeigen deutlich, dass mit Standard-Dehnungsmessstreifen von HBM bereits beachtliche Ergebnisse erzielt wurden. Um die Ergebnisse der mittleren absoluten Abweichung und des mittleren relativen Fehlers weiter zu optimieren, wird an der Technischen Universität Darmstadt ein Folgeprojekt durchgeführt.
Über die Technische Universität Darmstadt
die Technische Universität Darmstadt ist eine der führenden Technischen Universitäten in Deutschland mit hoher internationaler Sichtbarkeit und Reputation. Seit ihrer Gründung im Jahr 1877 zeichnet sich die TU Darmstadt durch einen besonderen Pioniergeist aus. Durch herausragende Forschungsleistungen eröffnet die TU Darmstadt wichtige wissenschaftliche Felder der Zukunft.