为了测量最小的电阻变化,需要将应变片需要以全桥方式安装(见图2)。在 ANSYS Workbench 19.1 帮助下,应变被确定到指定方向。
采用 HBM 应变片开发三分量力传感器
如何为负重行走机器人开发更具成本效益的感应足?本课题是达姆施塔特工业大学仿真机器人项目的一部分。
其采用了 HBM 应变片开发了一款三分量力传感器,以实现对机器人的运动控制。
挑战
为承重行走机器人开发更具成本效益的感应足
解决方案:
采用基于 HBM 应变片的三分量力传感器,以实现对机器人的运动控制。由于应变片带有背胶,因此更易安装,并可采用热固化方式,更牢固。
结果:
12个HBM应变片以全桥方式连接到全桥上,以测量最小的电阻变化。首次试运行非常成功,并将在后续项目中进一步优化。
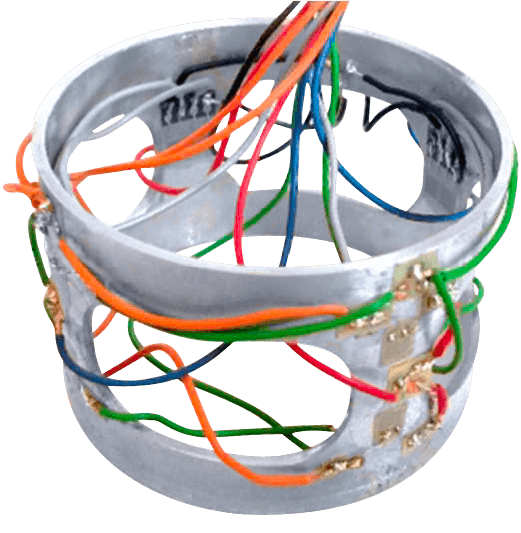
三分量力传感器结构
, Arrangement of the attached strain gauges on the unrolled feather-spring component")
这种三轴力传感器采用铝制圆柱形梁式结构。生产简单,成本低廉。
为了测量 x、y 和 z 轴方向的力,共安装了三个应变全桥:
- z 方向力测量: 4个应变花 K-TA11K3/350 采用双组份冷固化胶安装在薄片式弹性体内部。
- x 和 y 方向力测量: 8个应变片 K-LU13K1.6/350 被黏贴在弹性体外部。这种 带背胶的应变片 可以采用热固化方式,并且安装更方便。
应变计的排布如图1所示。1-4号应变片测量z方向,5-12号应变片测量x和y方向。

产品原型测试运行
为了对三分量力传感器进行验证,开发了一个产品原型。在第一次试运行中需要对该原型进行评估和校准。借助校准装置,三个方向的力依次加载。
输入和输出的校准条件如下:
| x-通道零点信号 (mV) | 11.42 |
| y-通道零点信号(mV) | 5.13 |
| z-通道零点信号(mV) | -28.90 |
| 供电电源(DC 直流 V) | 3.3 |
| 放大器 | ADS1262 |
| 测量范围 (V) | +/- 0.156 |
| x-通道系数 | 16 |
| y-通道系数 | 16 |
| z-通道系数 | 16 |

测试运行结果
校准的测量曲线以橙色、绿色和黑色显示在图表中。参考力值以蓝色蓝色曲线显示,用于比较。



与参考传感器的绝对平均误差和相对平均误差:
| 力方向 | 绝对平均误差 (N) | 相对平均误差 (%) |
| Fx | approx. 3 | 约 1.5 |
| Fy | approx. 4 | 约 2.6 |
| Fz | approx. 23 | 约 3.1 |
第一次试运行的结果清楚地表明,HBM 标准应变片已经取得了相当大的成功。为了对绝对平均误差和相对平均误差进一步优化,达姆施塔特技术大学正在进行一个后续项目。
达姆施塔特技术大学简介
达姆施塔特技术大学 是德国领先的科技大学之一,在国际上享有很高的知名度和声誉。自1877成立以来,独有的创新精神一直是达姆施塔特技术大学最鲜明的特色。通过杰出的研究成果,达姆施塔特科技大学一直在面向未来的科学领域进行开拓。