
Diafonía: ¿por qué se produce?
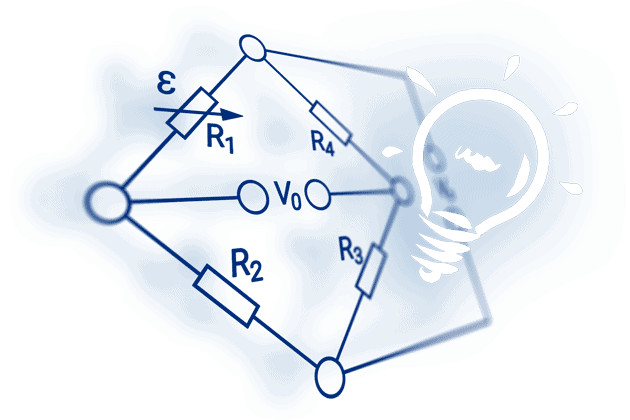
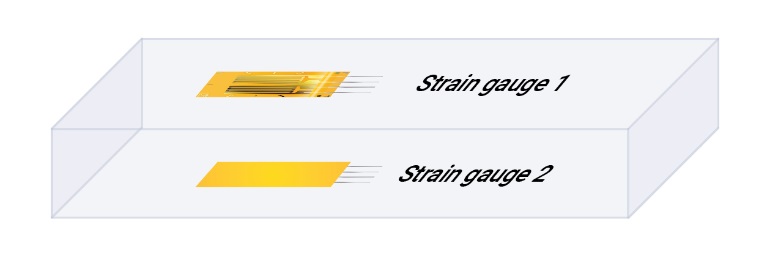
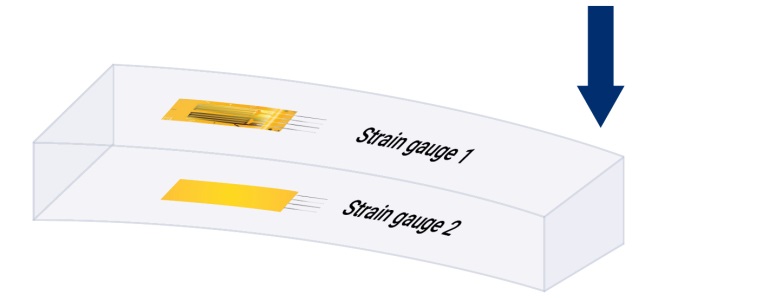
En el ejemplo anterior, lo más probable es que se registre una pequeña señal incluso aunque solo se aplique una fuerza de tracción al transductor. El motivo es que, para que la señal de salida sea exactamente cero, las cuatro galgas extensométricas deberían someterse exactamente a la misma deformación y tener idéntica sensibilidad. Pero, en la práctica, los cuerpos de medición presentan tolerancias y la sensibilidad varía de una galga extensométrica a otra.
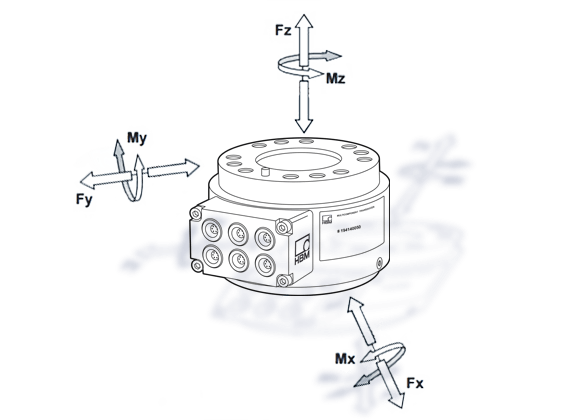
Por esta razón, cualquier sensor multicomponente tiene efectos indeseables de interferencia de señales: es lo que se conoce como diafonía. Aunque solo se aplique fuerza en una dirección o un único momento de flexión, los demás canales detectan un señal de medida muy pequeña.
Diafonía: ¿cómo se compensa?
Lo primero que hay que valorar es si se necesita de verdad una compensación, ya que los sensores de la serie MCS10 reducen la diafonía al mínimo.
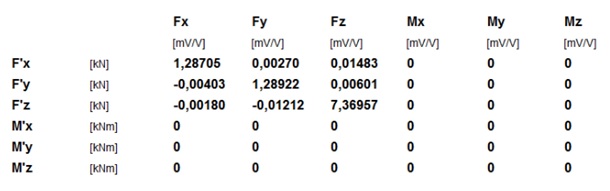
La calibración de HBK no solo mide y evalúa la componente en la que se aplica la carga, sino también todos los demás circuitos de medida del sensor. Con ello se garantiza que el sensor se mantenga siempre dentro de la tolerancia, ya que la diafonía es una característica técnica especificada en la hoja de datos. Cuando se aplica una fuerza en la dirección Z, se conoce su efecto en las direcciones X e Y. Asimismo, también se conoce su efecto en los circuitos de medida que registran el par y los momentos de flexión. Y lo mismo se puede decir de las demás componentes.
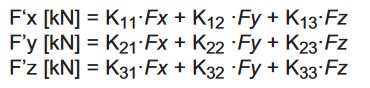
El resultado de esas medidas de calibración puede consultarse en la documentación que acompaña al sensor. También se puede expresar en forma de una matriz: