以下のデジタル信号は、信号sから導出されています。
例;sはmmの変位または度の角度です。分解能aは、出力信号の正確に一つの周期で、sと同じ単位を有する。
この方法は、s負の値をサポートしていません。
信号はPX878のプラグインカードのデジタル出力を介して出力されます。電気的特性は、約1 kHzの最大周波数を制限します。
一部の機能ブロックは、2トラックとゼロのインデックスを持つ、デジタルインクリメンタルロータリエンコーダをシミュレートすることを可能にします。変位や角度の値は、入力信号として使用されます。
以下のデジタル信号は、信号sから導出されています。
例;sはmmの変位または度の角度です。分解能aは、出力信号の正確に一つの周期で、sと同じ単位を有する。
この方法は、s負の値をサポートしていません。
信号はPX878のプラグインカードのデジタル出力を介して出力されます。電気的特性は、約1 kHzの最大周波数を制限します。
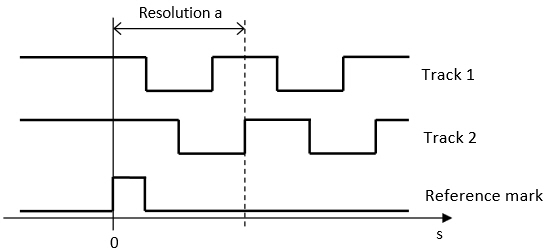
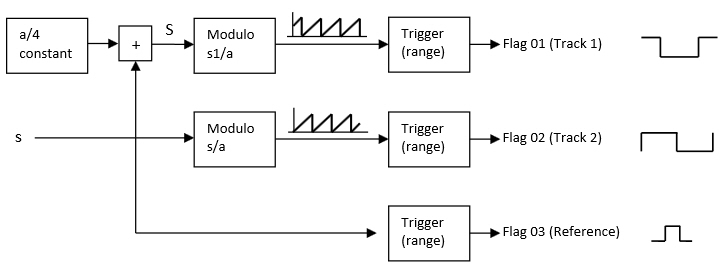
まず、解像度aの1/4はトラック1との間の所望の位相シフトを取得し、2を追跡するのに追加され、周期性が(=分割秒/αの剰余)ブロックを法によって生成されます。このようにして生成された信号は、周期aと値0の範囲を持っています。
最後に、トリガーブロックは、a/2との比較を通して、デジタル信号(フラグ)を生成します。

この例では、変位エンコーダ0〜100 mmのは、sを提供します。
解像度は1 mmです。一定の信号a/ 2およびa/4提供します。
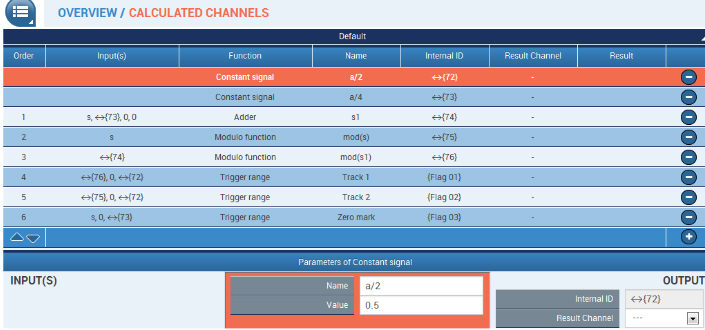
位相シフト:s1 = s + a/4
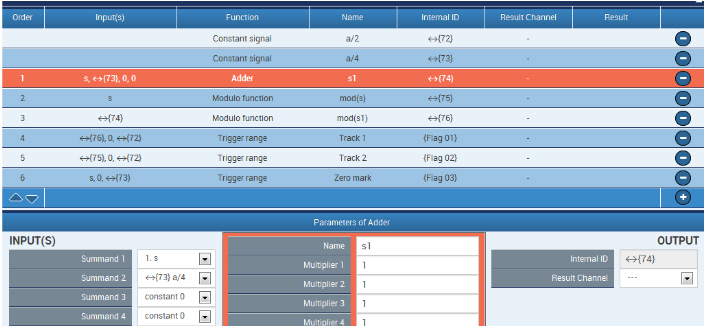
余剰ブロックは、「Track 1」「Track 2」のために周期的な信号を出します。
除数は、このケースで(解像度a)1 mm単位です。
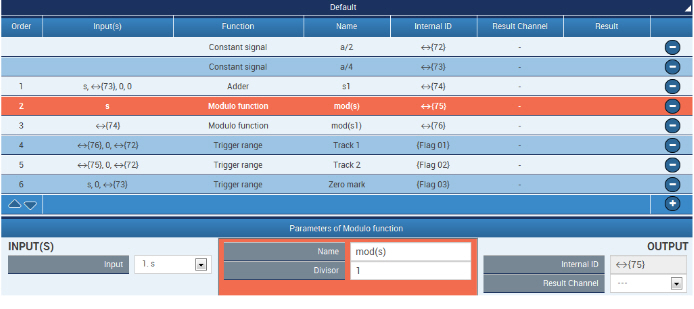

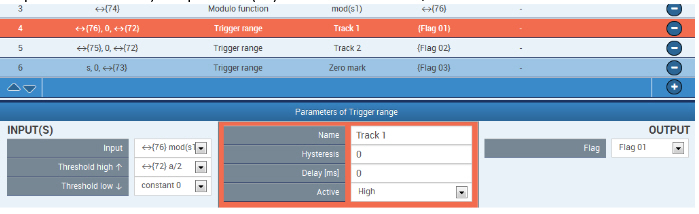
トリガーブロックは、Flagに周期的な剰余信号を変換します。出力「Track1」が 入力 mod(s1) 0と a/2の間であれば、剰余信号を変換します。
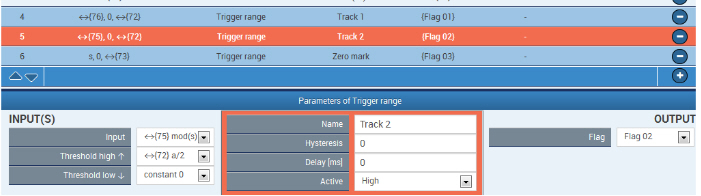
Flag 02出力は「Track 2」
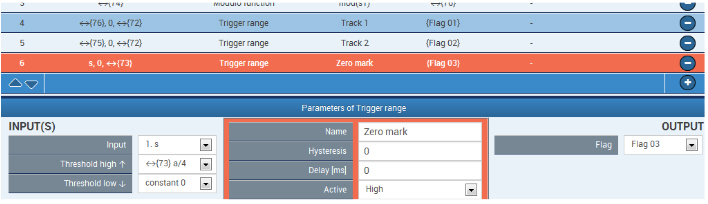
ゼロスケールマーク(Flag03)は、sは0とa/4との間にある場合
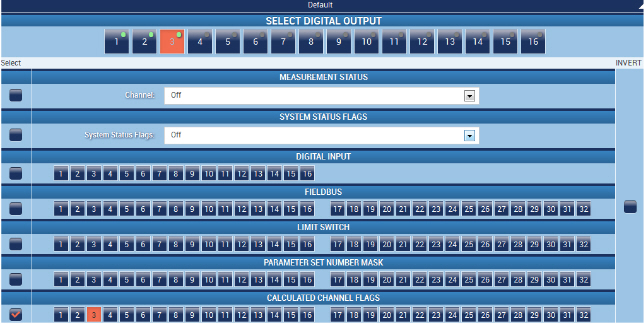
デジタル出力1 (Track 1, Flag 01など)のFlagの出力

Output 2 = Flag 02, Track 2:

Output 3 = Flag 03, ゼロスケールマーク:
PX878の出力特性
出力の電気特性を観測することが必須です。 周波数は1kHzを超えないようにしてください。10〜30 Vの出力電圧が外部から供給される必要があります。ハイサイドドライバが関係しており、必要に応じてプルダウン抵抗をGNDに接続します。または差動出力が設定されます。EIFが必要です。
作動出力
差動出力が必要な場合、Flag(フラグ)を2つのデジタル出力に並列に割り当てる必要があります。
2番目の出力は反転されています。これで出力の数は2倍になります。ここでは、Flag 01が、反転した出力2に割り当てられていました。

出力の更新レート
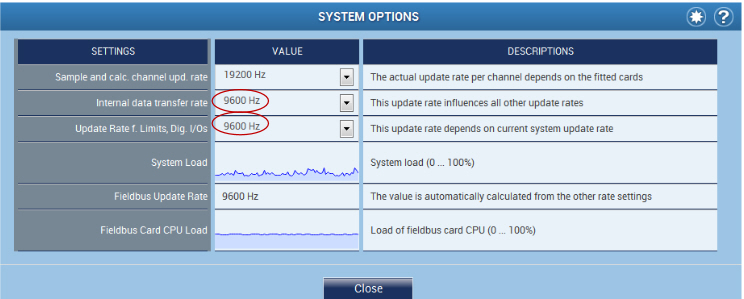
標準のデジタル出力は、2.4 kHzで更新されます。出力は「パルス幅(jitter)が変わるべきで、速度が増加されるべきです。
これの設定は、「Settings」 -「System」 -「Device」 -「System Options menu」の順で行います。まず、内部データ転送レートを大きくし、その後「Update Rate f. Limit, Dig. I/Os 」も大きくする必要があります。システム負荷を監視する必要があります。
参考:
例: CODESYS デバイスの仕様に応じて、更新レートを高めなくてもよい。
入力信号が負の値を有する場合には、解像度の定数倍で、sは常に正となるように加えることができます。(EGS= s_original+1000)
アンプの設定で「ゼロ値」とは、別のオプションです。この値は、正の値になっていることで、測定値が有効になります。
The shifting of the measured value does not impact on the periodic modulo functions, however, the switching thresholds of the zero scale mark need to be adapted, if necessary.
ここに記載した事例は、お客様にご参照いただくためのものです。いかなる形でも、保証や賠償の対象にはなりませんので、ご了承願います。