ガイゼンハイム大学(Geisenheim Univ.)が、急斜面における作業を機械化する新手法を開発しました: それがブドウ裁培用ロボット「Geisi」です。
Geisiは、最大70%の傾斜地で作業をする能力があり、ガイド用のロープなしでリモート制御できます。
急斜面でのブドウ裁培は、ドイツのワイン栽培地区ではおなじみの風景です。しかしながら、このような耕作地の割合は着実に減少傾向にあります。2010年には、全耕作面積のわずか9%にまで減少しました。理由の1つは、急斜面でのブドウ栽培は完全に手作業になるからです。これは危険なうえ肉体的に過酷でコス ト的にも割高な作業になります。しかしながら、ガイゼンハイム大学の工学部が、急斜面でのブドウ裁培を機械化により容易にすることで、この事態を改善する プロジェクトを立ち上げました。
シュヴァルツ教授が率いるチームは、急斜面での作業を機械化する新手法の開発に着手しました: それは、Geisiと呼ばれるブドウ裁培ロボットです。今までの耕作作業の機械化と異なる点は、Geisiは最大70%の傾斜地で作業をする能力があり、 ガイド用のロープなどが不要で無限軌道上をリモート制御できる点です。これは労働コストを削減すると同時に、作業の安全性が大きく向上します。
この疲れを知らない急斜面用ブドウ裁培ロボットは将来的には、作物の保護、根囲い、落ち葉処理などの標準作業を、無人で実行するようになります。そのうえ、Geisiは既存の急斜面作業用の機械化システムよりも低価格です。
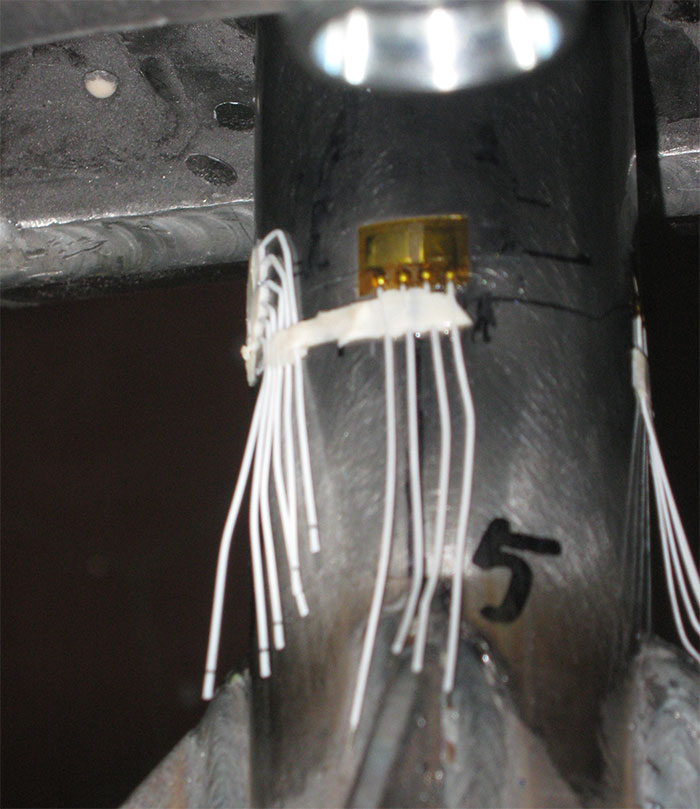
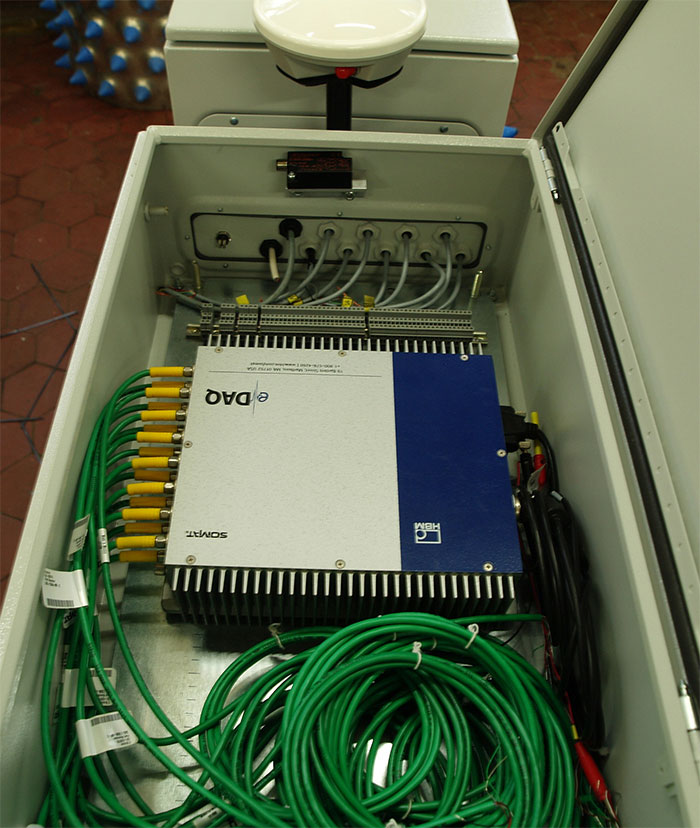
これらの目標を実現するために、プロジェクト・マネージャはHBMの試験計測システムを採用しました。試験計測の専門家が、ひずみゲージ、および、堅牢 でモバイルなデータ収集システムSomat eDAQを効果的に使用することにより、急斜面でも無人で、高い信頼性で作業できるGeisiが誕生しました。