Elektrische Antriebe bieten vielfältige Möglichkeiten um Straßenfahrzeuge mit regenerativen Energien zu betreiben [1]. Dabei ist das batteriebetriebene Fahrzeug eine einfache und übersichtliche Variante.
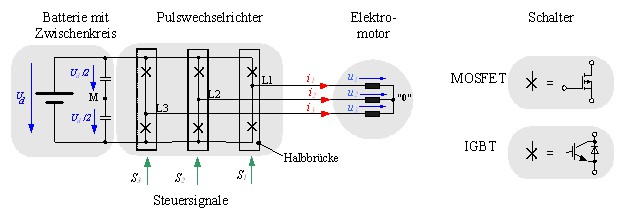
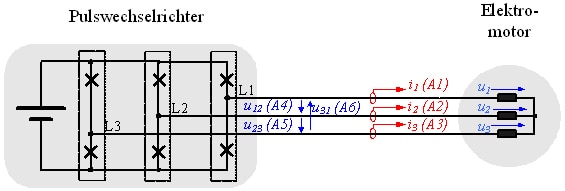
Bild 1.1 zeigt den Antriebsstrang eines solchen Elektrofahrzeuges. Die Gleichspannung der Fahrzeugbatterie wird über den dreiphasigen Pulswechselrichter in eine Drehspannung umgeformt und auf einen Drehstrommotor geschaltet. Als Leistungsschalter werden je nach Höhe der Batteriespannung unterschiedliche Leistungshalbleiter eingesetzt. Bei Batteriespannungen unter 100 V werden als Leistungshalbleiter MOSFET (Metal Oxide Semiconductor Field-Effect Transistor) und bei größeren Spannungen werden IGBT (Insulated-Gate Bipolar Transistor) eingesetzt. Als Elektromotoren werden üblicherweise Asynchron- oder Synchronmaschinen verwendet.
Um den Antriebsstrang eines Elektrofahrzeuges testen und optimieren zu können, sind innovative Messgeräte notwendig, die zum einen eine hochgenaue Leistungsmessung und zum anderen die Berechnung von unterschiedlichen Zwischengrößen ermöglichen.