
크로스토크는 어떻게 발생할까요?
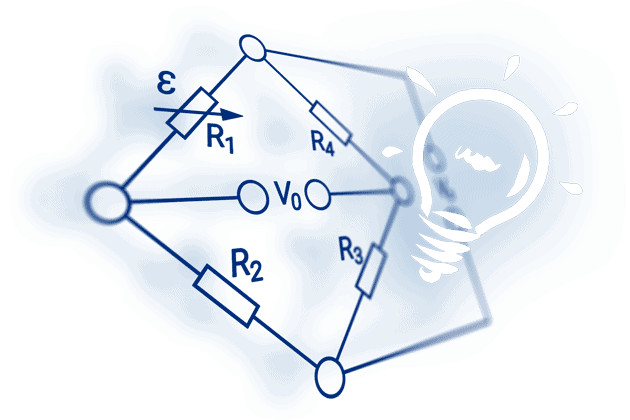
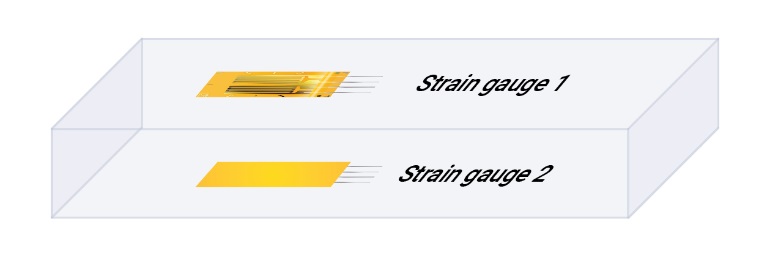
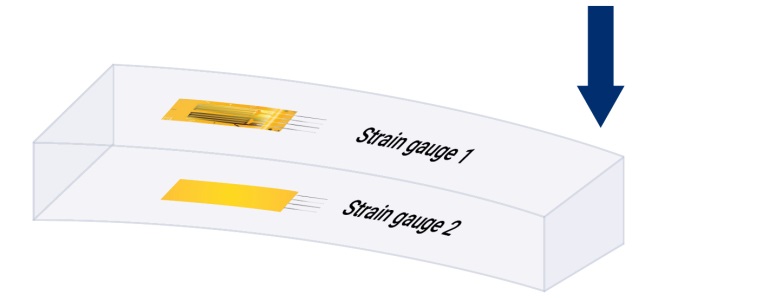
위의 예에서 인장력이 트랜스듀서에 가해지더라도 작은 신호가 측정될 가능성이 높습니다. 4 개의 스트레인 게이지가 모두 정확히 동일한 스트레인을 경험하고 정확히 동일한 감도를 가질 때만 정확히 0이 측정되기 때문입니다. 실제로 측정 본체에는 공차가 있으며 스트레인 게이지도 감도가 다릅니다.
이러한 이유로 모든 다축 센서에는 크로스토크라고하는 원치 않는 신호 간섭 효과가 있습니다. 한 방향의 힘이나 굽힘 모멘트만 가해지더라도 다른 채널에서 매우 작은 측정 신호를 감지 할 수 있습니다.
크로스토크는 어떻게 보정될 수 있을까요?
먼저, MCS10 시리즈 센서로 크로스토크를 최소화해서 설계되었기 때문에 보정이 필요한지 확인합니다.
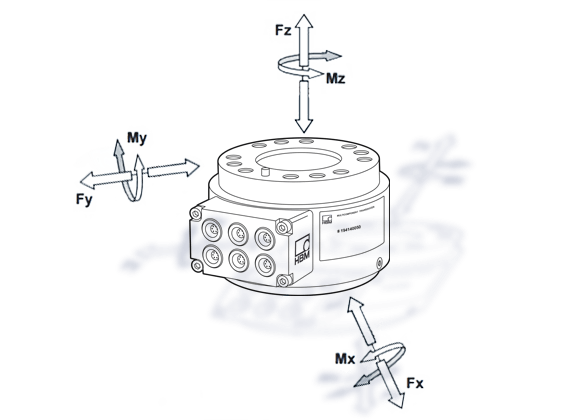
HBK의 교정에는 부하가 적용되는 구성 요소뿐만 아니라 센서의 다른 모든 측정 회로도 측정하고 평가하는 작업이 포함됩니다. 이렇게하면 크로스토크가 데이터 시트에 지정된 기술적인 기능이므로 센서가 허용 오차 범위 내에서 유지됩니다. z 방향의 힘이 x 및 y 방향에 미치는 영향과 토크 및 굽힘 모멘트를 기록하는 측정 회로에 미치는 영향이 알려져 있습니다. 물론 이것은 다른 모든 구성 요소에도 적용됩니다.
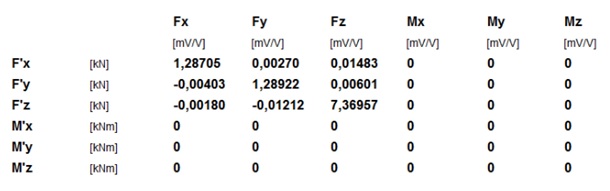
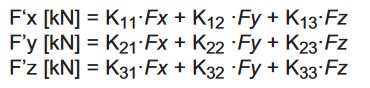
이러한 측정 결과는 센서와 함께 제공된 문서에서 찾을 수 있습니다. 다음과 같은 행렬로 표현됩니다.