회전 속도 계측 시스템 실행
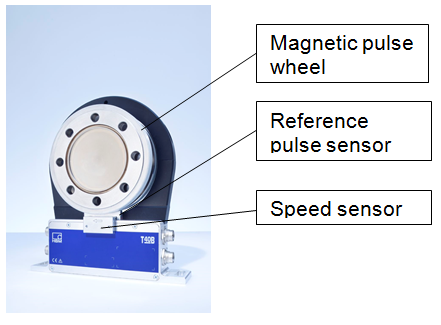
자기 플라스틱 링의 금속 캐리어를 토크 트랜스듀서 의 제2 자유 플랜지에 장착하여 완전히 통합합니다. 그러면 공간이 절약되고 설치가 상당히 쉬워집니다.
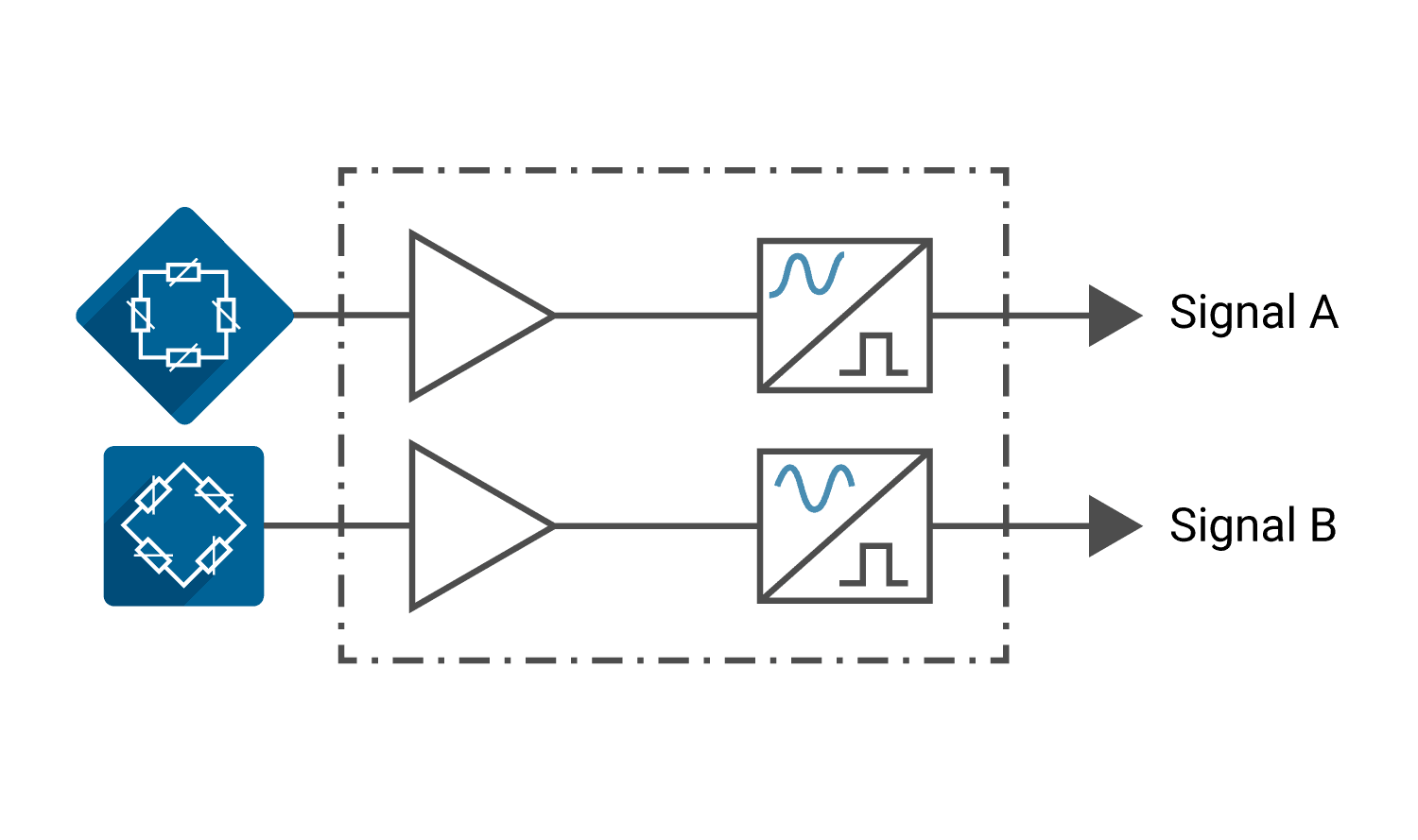
이 시스템은 비등방성 자기저항(AMR)을 이용한 자기 펄스 휠의 비접촉식 감지 기반 시스템입니다. 사용된 센서가 자기장의 영향을 받게 되면, 그 저항값은 자화의 각도와 저항기의 방향 벡터에 따라 다릅니다. 자기장은 재료 치수와 센서간의 상대적 운동에 의해 조절됩니다. 또한 자기장은 방사 방향으로 감지되기 때문에 강력하고 안정된 신호가 보장됩니다. 펄스 휠과 센서 간의 최대 공극은 2.5mm입니다.
이 때문에 계측 시스템은 테스트 벤치 진동 결과 발생하는 회전자와 고정자 간의 상대적 운동에 아주 둔감하게 됩니다.