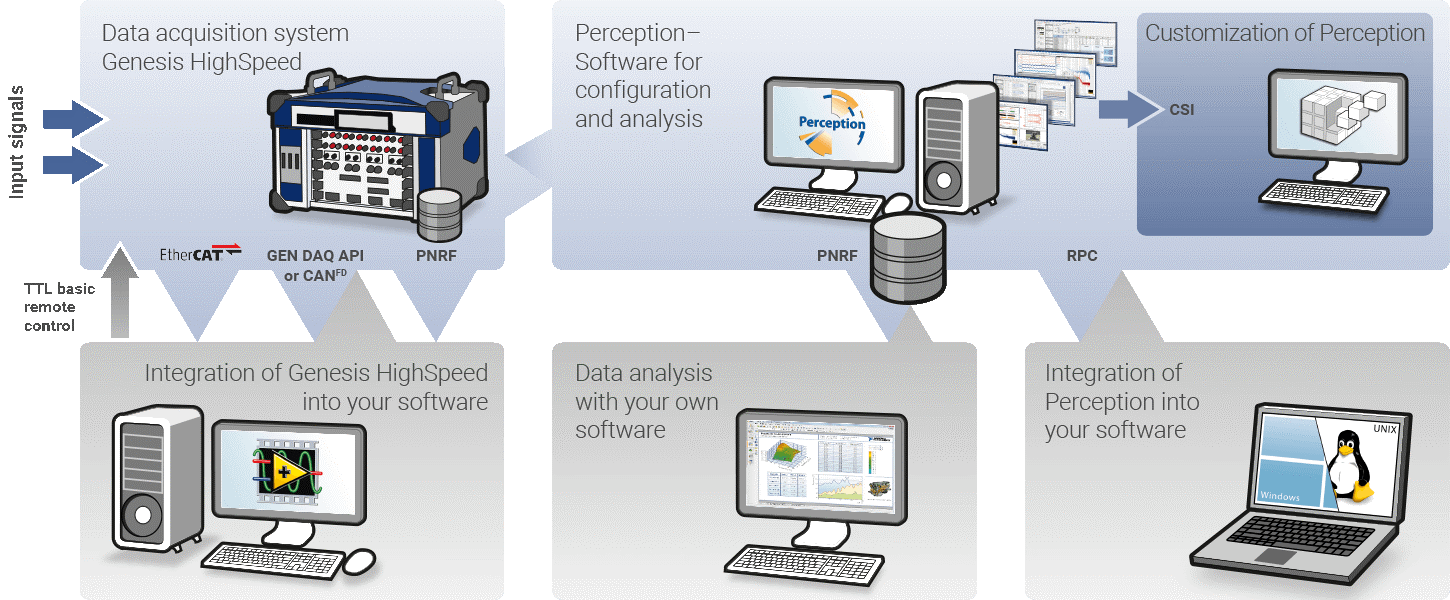
O sistema de aquisição de dados Genesis HighSpeed e o software Perception são ferramentas muito poderosas para suas medições de alta velocidade. Você pode integrá-los em seu ambiente específico e usá-los exatamente da maneira desejada, selecionando uma das várias opções de interface aqui: GEN DAQ API, EtherCAT Interface, CAN 2.0/CANFD Interface, PNRF Reader Toolkit, Perception Remote Control, Perception Custom Software Interface (CSI).