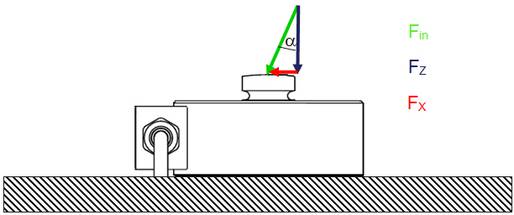
 a. Fuerzas laterales
a. Fuerzas laterales b. Momentos de flexión
b. Momentos de flexión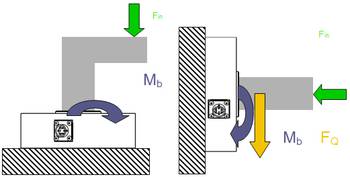


Los transductores diseñados para registrar la fuerza exclusivamente en la dirección de presión suelen estar equipados con una pieza convexa sobre la que se aplica la carga.
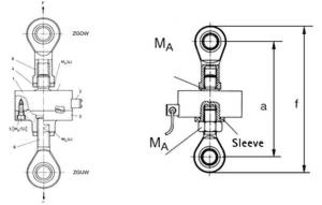
La aplicación de la fuerza sobre esta pieza de carga se lleva a cabo con la ayuda de accesorios de aplicación de carga, que se encuentran disponibles para muchos modelos de transductor. Por ejemplo, piezas de aplicación de fuerza como las que se muestran en el diagrama de más abajo.
Este tipo de piezas de aplicación se colocan directamente en el punto de aplicación de la fuerza. Solo hay que tener cuidado de que no haya objetos extraños entre la pieza de aplicación y el transductor de fuerza. La pieza de aplicación tiene libertad de movimientos de rotación e inclinación, lo cual evita que se apliquen al transductor momentos de flexión y de torsión.
Si el transductor se instala sin una pieza de aplicación de fuerza de este tipo, el componente que entre en contacto con la zona convexa de aplicación de la fuerza debe cumplir los siguientes requisitos:
- HBM recomienda una dureza de al menos 43 HRC.
- La cara de apoyo debe estar rectificada.
- El montaje debe hacerse de manera que el componente en contacto no pueda levantarse y el transductor no sufra impactos.
- Si es posible, el componente en contacto debe poder girar y contar con un soporte basculante que evite momentos de flexión y torsiones.
En general, los transductores de fuerza se colocan en la estructura de la aplicación. Eso significa que la fuerza se dirige hacia la estructura que se encuentra bajo el transductor. No obstante, también es posible el montaje horizontal. En este caso, el transductor debe unirse a la estructura mediante una conexión rígida.
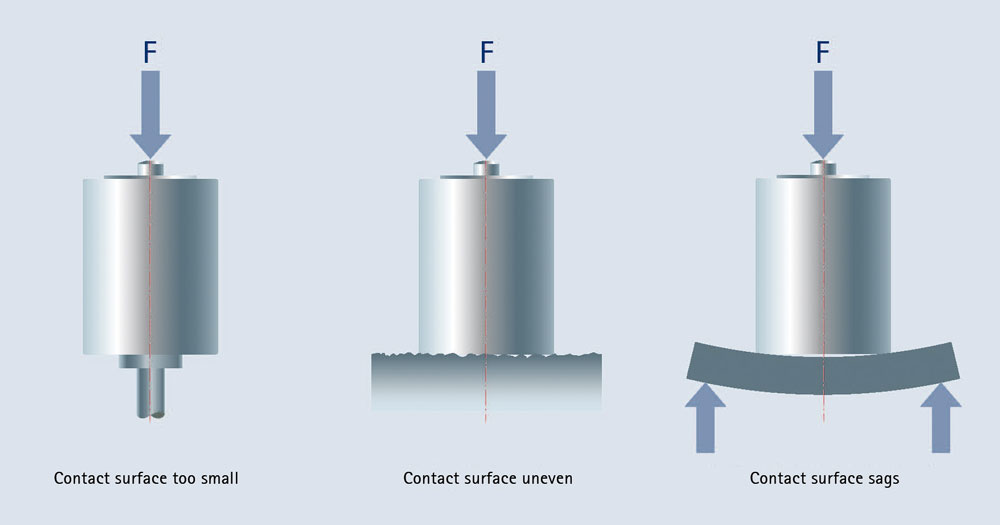
En cualquier caso, el elemento estructural sobre el que se asiente la parte inferior del transductor debe estar diseñado para recibir las fuerzas con una deformación mínima. Para ello, debe tener una rigidez suficiente.
Igualmente, es importante que la superficie sea plana. La irregularidad máxima admisible es de 0,005 mm. Un sustrato plano garantiza que el transductor de fuerza se deforme del modo necesario para alcanzar la precisión máxima de medición del fabricante.
La estructura del sustrato debe ser resistente a la deformación y debe tener un diámetro mayor que el del transductor de fuerza. Una subestructura que se deforme de manera significativa o una superficie de apoyo insuficiente o irregular propicia estados de deformación que no se han tenido en cuenta en el diseño del transductor. Por tanto, los datos técnicos relacionados con la sensibilidad, la linealidad y la histéresis podrían cambiar.