
クロストーク:クロストークの発生原因:
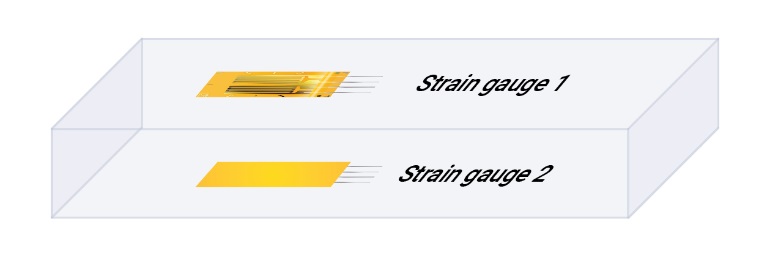
上記の例では、センサに引張力を加えても、小さな信号が計測される可能性が高くなります。これは、 4つのすべてのひずみゲージがまったく同じひずみを持ち、まったく同じ感度を持つ場合にのみ、正確にゼロが計測されるためです。実際には、計測ボディには公差があり、各ひずみゲージの感度も異なります。
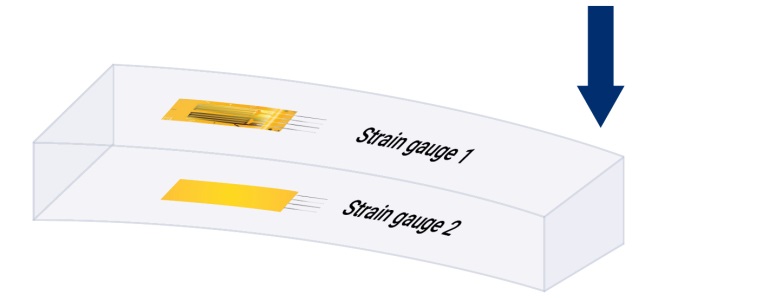
このため、すべての多軸センサには、クロストークと呼ばれる不要な信号干渉の影響があります。一方向の力のみ、または曲げモーメントのみが適用されている場合でも、他のチャンネルでは非常に小さい計測信号を検出できます。
クロストーク:クロストークを補正する方法
まず、 MCS10 シリーズのセンサを使用してクロストークを最小に抑えるため、補償が必要かどうかを検討します。
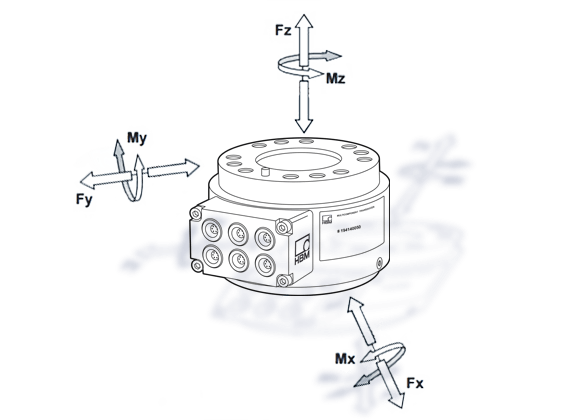
HBKでのキャリブレーションには、負荷が適用されているコンポーネントだけでなく、センサ内の他のすべての計測回路の計測と評価が含まれます。これにより、クロストークはデータシートで指定されている技術的な機能であるため、センサは許容範囲内に留まります。x方向と y方向
の z方向の力の効果、およびトルクと曲げモーメントを記録する計測回路への影響が知られています。もちろん、これは他のすべてのコンポーネントにも適用されます。
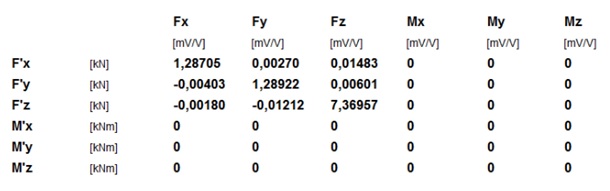
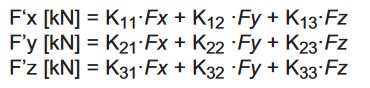
これらの計測結果は、センサに付属のマニュアルに記載されています。次のようなマトリックスで表されます。