Mesures dynamiques et précises de puissance
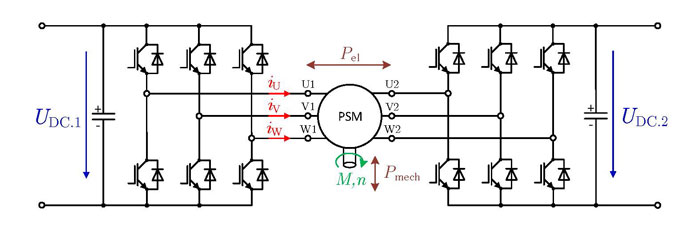
L’évaluation et la caractérisation de transmissions électriques et de leurs stratégies de contrôle associées, dans les domaines de l’industrie et de la mobilité, requièrent des mesures précises et très dynamiques. Le système électrique, dans ces domaines d’application, est typiquement constitué d’un convertisseur à 2-étages, d’une machine électrique à 3 phases et d’une source de tension associée.
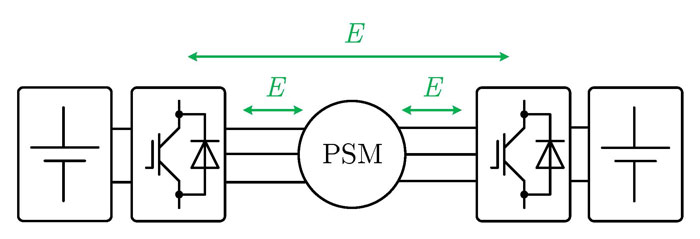
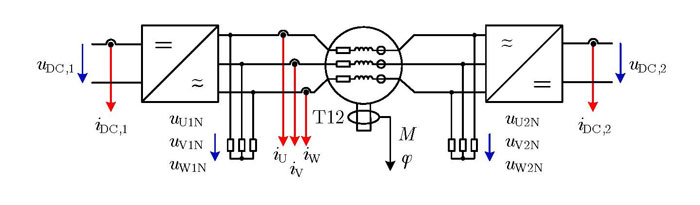
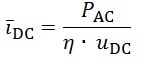
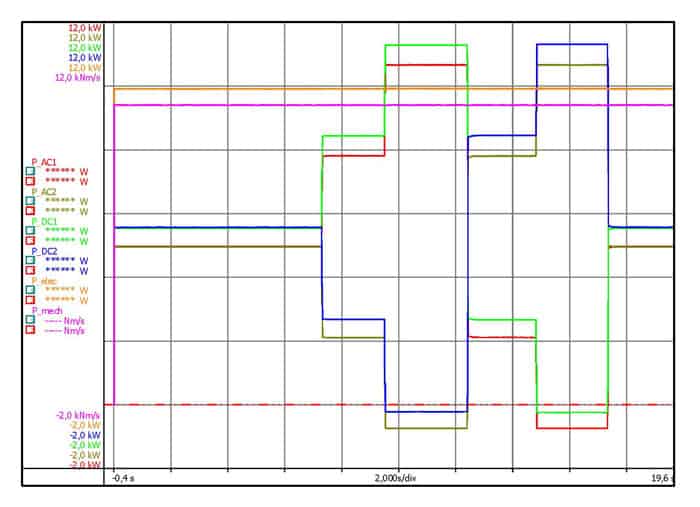
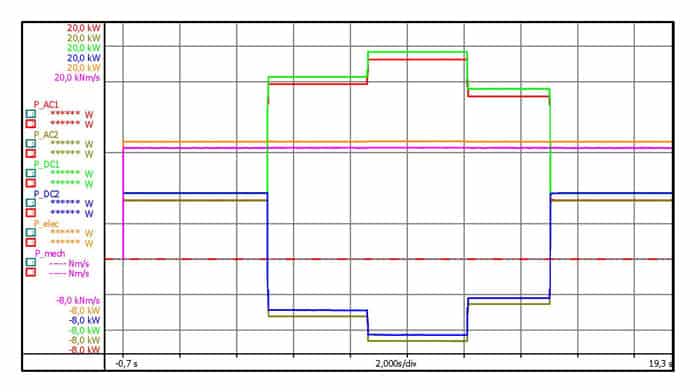
Dans cet article, la topologie du double convertisseur à 2-étages (DTLI) est présentée dans le détail. Cela est suivi par une présentation des modalités d’acquisition des variables mécaniques et électriques avec un système d’acquisition de données GEN3i et des calculs de puissance Temps Réel associés.