正确地加载是获得高精度称重结果的前提。加载方向,支撑结构或安装工具,都可能会其造成影响。
对传感器的负荷导入点,包括和被测物之间以及器及其支承表面之间,要特别注意不作用于测量方向上的负荷分 器及其支承表面之间,不作用于测量方向上的负荷分 量会使产生测误差,也可能缩短传感器的寿命。
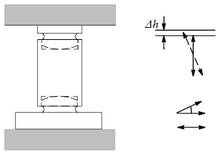
传感器只准用于指定的负荷方向,对于一些 HBM 称重传感器 (例如. Z6, Z7 和 HLC), 以箭头标示负荷方向。
要尽量避免侧向力和弯矩,以下是传感器正确的负荷导入和错误例子
正确地加载是获得高精度称重结果的前提。加载方向,支撑结构或安装工具,都可能会其造成影响。
对传感器的负荷导入点,包括和被测物之间以及器及其支承表面之间,要特别注意不作用于测量方向上的负荷分 器及其支承表面之间,不作用于测量方向上的负荷分 量会使产生测误差,也可能缩短传感器的寿命。
传感器只准用于指定的负荷方向,对于一些 HBM 称重传感器 (例如. Z6, Z7 和 HLC), 以箭头标示负荷方向。
要尽量避免侧向力和弯矩,以下是传感器正确的负荷导入和错误例子

压式传感器底部必须放置于平坦的能承重的基座上,此基座在负荷下不会变形。为使一均匀负荷从传感器底部可靠地传递到基座,传感器必须固定于坚固的基座上,对于平面支承的传感器尤其必要。传感器基座必须能承受与负荷相应的支承力。
尽管整体稳定,有时基座在负荷作用下也能强烈变形。由于这一变形可同时引起支承面的沉降,所以在此情况下必须保持所有基座的沉降大小相等,以避免倾斜,及由此产生的侧向力。总的来说,刚性结构的基座优于柔性结构,软结构的各处很难达到均匀下沉,且会造成整个结构的附加应力。

称量容器或监控填充状态时, 必须考虑由于温度变化而产生的容器和支架的水平运动。刚性安装附件阻止这一运动,最终产生水平侧向力,致使产生测量误差。这一作用力有时使传感器损坏甚至完全断裂。这种情况可能出现在负荷加载点处,偏心的负荷或斜向负荷可能产生扭力和侧向力,因此需选择能避免温度变形或其他因素引起的水平力的结构。
使用安装附件装配传感器的准则,是排除多方面的干扰。因而要求视应用而定选择具体的安装附件。然而说到底,只有对称重技术了如指掌的设计工程师才能确定测量过程中的干扰情况。因此对不同的传感器结构,不光有广泛的负荷导入方式,也有多种安装附件的选择。
典型的弹性支承体是许多重迭安置的钢板和胶层,通过硫化过程互相连结的。很小的力也会使上面和下面的负荷引导面平行移动。所以最上支承板能避免侧向力,而不给传感器下支承板附加力。容器和传感器之间的水平平移最多可达15mm。同时,在平移中产生回复力,使容器又回到起始点,此力与负荷无关,而正比于平移距离,根据弹性支承体型号的不同可达800牛顿,这一支承能平衡倾斜达1.7°的容器。
尤其对冲击式的负荷振动和其他由外部引发的振动,弹性支承体的阻尼作用是有利的。此外,弹性支承体被设计成良好绝热,其层式结构使容器与传感器之间的热传导为极小。为限制侧向偏移,只要设置端点偏移保护,而无须操作部件。
注意:由于待称容器连接管道使弹性体支承在额定负荷时变形大约一个毫米,这已明显地大于传感器的实际变形量,若不予考虑会产生大的误差。
尽管不用通常的导杆束缚,重心不稳时必须确保容器被结实固定。在容器称量领域内,弹性支承体是能满足低中精度要求的成本低廉和简单的构件。


这是对在重量加载偏心时,能自主地回到起始点而设计的传感器,这里利用了稳定平衡的物理特性。作为摆动体的传感器占有负荷引导面,其曲率半径大于传感器高度。对初始位的摇摆导致加载点升高,从而使传感器自归中。
在技术参数表中允许的最大摇摆度,如对C16/40T型,最大为13毫米/5°,此值绝不允许超过,因摇摆过大会损坏传感器和负荷导入点,这个问题可简单地通过调节装配结构的阻挡器到适合的位置来解决。对成本低廉,易于安装而言,上下各一个HBM压头就足够了,防旋转保险装置可阻止轴向的旋转运动。
HBM双摇柱摆式传感器C16的额定负荷为20吨到200吨,它适于中高精度要求。
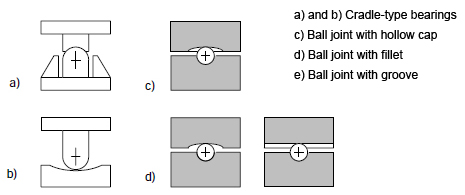
带有摆支承和摆支承座的标准梁式传感器和C系列传感器能达到自归中的性能,这就使制造高精度容器秤成为可能。摆支承的结构形式,能达到3°的偏移而没有明显误差,支承点的水平位移可以被限定在一定范围内。多数ZPL型摆支承由二个支承座和一件柱式支承组成,对ZPS型摆支承仅仅柱式支承和EPO3压头各一个就能满足要求。
摆支承在位移中加载点相对于出发点被略加提高。由此产生回复力,这个回复力使系统回到初始状态,因此摆支承和摆支承座可看成是自归中的。 同时它们被证明是容易安装的,固紧容器或平台的侧面的导杆是不必要的。值得推荐的是通过端头偏移保护来限制侧向偏移。就象应用弹性支承体一样,为了安全的需要,应保证容器有抬升保护和坠落保护。
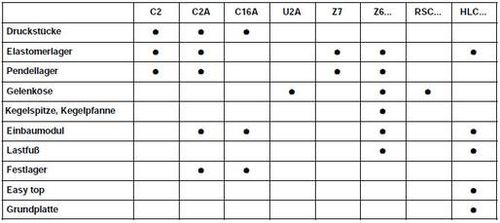
 | 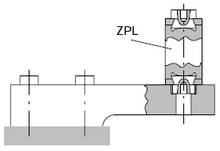 |
| C2A with ZPS | Z7 with ZPL |
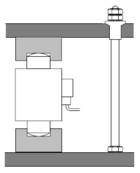
传统的衡器制造以机械秤的结构为最高的精度。对电子衡器,“锥尖”和“锥座”,相当于机械秤的“刀口”。
这一安装附件尤其适应于高精度要求的称重领域。但这种应用对动态负荷或振动是非常敏感的。

回扭机构应用于双弯曲梁传感器中,并使具有拉力或压力负荷在作用在一条直线上。 它的应用限于平台内仅带一个传感器或与两边吊钩一起悬挂的重物。
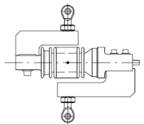
万向节联结适用于准静态的拉式负荷(负荷频率小于10赫兹),
其他的连接通常利用叉形件,频率更高的动态负荷应该用柔性的易伸缩的柱状体.
如果容器的支承脚上没有全部装有传感器,那么必须安装固定或倾斜支座,在应用固定支座时,可利用现成的构件,图4-9显示了由HBM提供的固定支座,以斜撑支着的双T支架组成、通过斜撑创造了一个很好的柔性区域,固定支座也在水平方向固定住了容器,这一方法也可以不用导向机构。要注意的是,传感器的偏移会引起固定支座微小的弯曲,从而引起测量信号的误差,可这一误差可以通过校准传感器的方法来减小。
HBM mounting aids and overview of accessories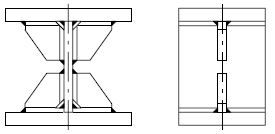
HBM 固定支座
对倾斜式支座而言上面描述的测量误差,实际上不会出现,因为这里没有弯曲应力可言,只发生细微的滚动摩擦,但是倾斜支座的水平偏移,远小于固定支座的,因此根据应用场合不同可能需要
摇臂轴承
建造容器秤时,其允许的位移基于传感器及其安装附件,这些安装附件或者是自归中的,部分是自复位的;机械保护器保护的是最大允许的侧向偏移。例如角度阻挡器,或橡胶缓冲。
Stops
若容器重心位于承载点之上,且同时不能排除风及其他外力影响,则容器也应针对倾倒或抬升加以保护。
这可设计两级保护或设计特别的反向抬升保护,例如,抬升保护可以在承载点附近垂直加入螺旋杆加以实现。在容器方面螺栓杆悬空地通过加载称体的钻孔伸入。其保护间隙是通过位于螺杆上的螺母调节的,通过在加载称体中钻孔的大小,通常也可限制最大侧向位移。
反向抬升保护
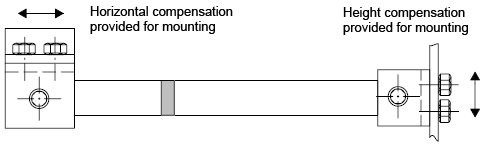
在使用非回位作用的多球支座或类似的元件时值得推荐的是以导杆固定容器。导杆的尺寸和结构设计成能传递测量力。并使在测量方向上阻止容器运动的力尽可能的小,导杆有下列形式:
张弦:
它们不传递垂直力,并以此很好地避免外力的影响。
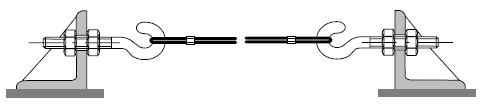
Tensioning rope
螺栓导杆:
它们在轴向方向产生与平衡水平力相应的反作用力,因此一个导杆必须两端同时使用螺栓。
Stay rods
扁棍导杆:
扁棍导杆对水平的位移产生轴向力而对垂直的偏移引起了弯曲,它容易产生附加力。但是即使在大截面和双面张紧使用时由于扁棍弯曲而产生的附加力的影响也是小的,但校准时必须注意附加力的作用。
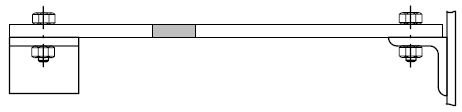
Flat stay rods
销子导杆:
销子导杆在垂直方向产生极小的附加力,然而导杆小小的的倾斜即能引起夹紧,以此产生摩擦力,并形成垂直方向的附加力影响。
因而装配中要求细心的定向工作,此外,在系紧容器,应确保不出现任何导致销子导杆倾斜的位移。
Bolt stay rods
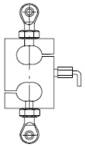
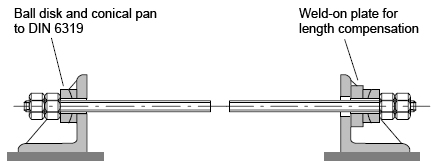
带万向节的螺栓导杆:
带铰链头的螺栓导杆与销子导杆具有同样的作用。然而由于万向节轴承可以向各个方向自由旋转,能避免倾斜。所以装配时只要水平校准导杆,这类带万向节的螺栓导杆对于容器结构的制造和装配误差要求较松。但导杆必须对万向节轴承进行保护,防止锁死,尤其当它暴露在户外。
[image missing]
Stay rods with end bearings