이 글에서 Mitchell Marks는 전기 인버터와 기기를 테스트할 때의 기본 요구사항에 대해 설명합니다.
"제어 기능 없이도 모터가 100년 동안 산업 부문을 장악해올 수 있었던 이유는 깨끗하고 신뢰성이 우수했기 때문입니다. 연결하면 바로 작동합니다. 이제는 모터를 제어할 수 있게 되어 휴대전화에서 잠수함까지 모든 곳에 통합되고 있습니다. 여러 용도로 응용되는 이 작업은 결코 중단되는 일 없이 지속되며 늘 변화할 것입니다."
전기 모터 드라이브 시스템을 설계할 때 다음과 같은 세가지를 고려해야 합니다.
이 세 요소는 DC 버스(DC 전력을 AC 전력으로 바꾸는 인버터) 역할을 하는 배터리와 AC 전력을 사용하여 전기 에너지를 기계력으로 변환하는 모터의 형태로 제공되는 경우가 많습니다. 이를 전기 기계식 전력 변환이라고 하는 경우도 있습니다.
엔지니어들은 이러한 시스템을 설계할 때 주로 드라이브 사이클 전체의 효율을 극대화하기 위해 노력합니다. 이들은 최대한 많은 지점에서 암페어당 토크를 극대화하여 이를 달성합니다. 이때 기발한 기기 구조를 사용하거나 적절한 제어 기법을 구현하는 경우가 간혹 있습니다. 인버터, 제어, 모터 모두가 조화를 이루어 작동할 때 이 목표가 극대화되지만 각각 별도로 개발되는 경우가 많습니다. 이 때문에 모터 효율이 매우 뛰어나지만 인버터에서 효율이 떨어지는 등의 문제가 생깁니다. 이로 인해 시스템 수준의 작업자와 엔지니어들이 시스템 전체의 역률을 극대화하는 일에 집중하게 되었습니다. 모터 드라이브 효율을 높여준다면 모터 효율이 약간 낮아도 괜찮습니다.

이 글에서 Mitchell Marks는 전기 인버터와 기기를 테스트할 때의 기본 요구사항에 대해 설명합니다.
"제어 기능 없이도 모터가 100년 동안 산업 부문을 장악해올 수 있었던 이유는 깨끗하고 신뢰성이 우수했기 때문입니다. 연결하면 바로 작동합니다. 이제는 모터를 제어할 수 있게 되어 휴대전화에서 잠수함까지 모든 곳에 통합되고 있습니다. 여러 용도로 응용되는 이 작업은 결코 중단되는 일 없이 지속되며 늘 변화할 것입니다."
이러한 용도에서 사용되는 전원 공급장치는 거의가 배터리이지만 전력 라인의 정류기 시스템을 사용하여 DC 버스를 생성하는 경우도 간혹 있을 것입니다. 이 DC 버스는 인버터로 이어지는 DC-DC 컨버터를 사용하여 높이거나 내릴 수 있습니다. DC-DC 컨버터가 배터리 시스템에 포함되어 DC 버스를 인버터에 맞는 수준으로 조정할 수도 있을 것입니다. 이러한 배터리는 대개 리튬이온 구조이며, 자동차 부문에서는 200~400V가 사용되지만 600~800V까지 높일 수도 있을 것입니다. 이렇게 큰 DC 전위로 작업하기가 훨씬 어렵기 때문에 이보다 높은 볼트를 선택하는 경우는 많지 않습니다.

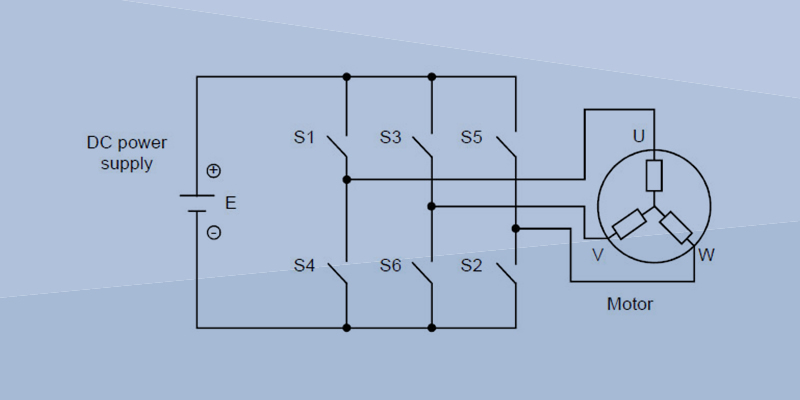
인버터는 전력 변환과 제어가 일어나는 곳이면 어디든 존재하기 때문에 시스템에서 매우 중요한 부품입니다. 인버터는 주로 특정 패턴으로 개폐되며 AC 전력을 생성하는 6개의 스위치(3상 작동용)로 구성됩니다. 이 패턴은 주로 9~25kHz 사이의 스위칭 주파수에서 실행됩니다. 9kHz 미만의 주파수는 상당히 잘 들리게 되었지만 고전력 용도에서는 손실을 줄이기 위해 이보다 낮은 스위칭 주파수가 필요합니다. 이보다 높은 스위칭 주파수는 스위치의 물리적 한계와 스위칭 손실 증가 때문에 제한됩니다. 일반적으로 IGBT 또는 MOSFET가 이러한 스위치에 해당합니다. 전류 수준에 따라 스위치를 선택합니다. MOSFET는 주로 저전력용입니다. IGBT는 고전력용으로 사용됩니다. 상위 주파수는 수동 소자 크기를 줄이고 제어력을 높일 수 있습니다. 따라서 와이드 밴드갭(wide bandgap) 소자에 많이 투자되고 있습니다. 그 대부분이 탄화규소 또는 질화갈륨(GAN) 소자일 것입니다. 이러한 소자는 손실이 적어 주로 높은 전류 및 스위칭 주파수에서 작동할 수 있습니다. 이런 소자는 가격이 매우 비싸고 지금은 그다지 견고하지 않지만 앞으로는 견고해질 것입니다.
제어는 그 구체적인 작용에 대해 말하는 사람이 없는 것 중 하나입니다. 소프트웨어이기 때문에 숨기기가 쉽습니다. 컨트롤러는 토크와 속도를 관찰하고 스위칭 주파수, 펄스폭 변조(PWM) 방법 및 효율 최적화 방법을 결정합니다. 이러한 측면은 전체 사이클에서 급변할 수 있습니다. 모터 유형과 상관없이 대부분의 제어 유형은 필드 지향 제어(FOC: field-oriented control)의 한 종류입니다. 데드비트(Deadbeat) 전류 제어가 성장 추세이지만 모든 제어는 폐회로 전류 제어가 될 것입니다.
이 제어에서는 직접 직교(direct-quadrature: dq0) 좌표 변환이 일어납니다. 이것은 시스템 요구에 따라 3상 PWM을 시각화하고 제어하는 산술 해석입니다. 이것은 3상을 2(작지 않음)처럼 보이게 하기 위해 위치 기준으로 사인 및 코사인을 조작하는 것입니다.
유도 기기를 제어하고 이해하기까지 사람들이 수학 문제를 푸는 데 약 50년이 걸렸습니다. 이 기기를 이해하기 전에도 50년 동안 기기를 사용하고 있었다는 것이 놀랍습니다.
누구나 어떤 것이든 컴퓨터 모델을 사용한 후에 실행합니다. 모델은 값이 싸고 매우 빠르면서 동시에 최적화된 방식으로 실행할 수 있습니다. 모터와 컨트롤러를 제작하는 일은 빠른 공정이 아닙니다. 모터와 제어기 최적화는 모델과 FEA에서 진행됩니다. 누구나 어떤 것을 만들기 전에 이 과정을 진행합니다. 모델은 모터와 인버터 거동을 매우 잘 예측하며 놀라울 정도로 유용한 도구입니다. 대부분의 장소에는 모델을 연구는 전체 엔지니어 그룹이 있습니다. 연구원들은 모델의 신뢰도를 높일 수 있고, 이러한 모델을 사용하여 모터와 제어기 거동을 예측할 수 있기 때문에 모델 검증을 좋아합니다. 이 모델 검증 영역에서 우리 제품이 실력을 발휘할 수 있습니다.
일과를 마치면 대부분의 용도에서 크기 제한과 비용 제한이 등장하는데 모터 디자인이 시작되기도 전에 이러한 제한에 따라 여러 변수가 결정됩니다.
따라서 그룹이 사용해야 하는 제어 방식에 따라 토폴로지와 세부 사항을 선택합니다. 냉각 기능을 사용할 수 있는지 그리고 모터 권선 방식도 결정해야 합니다. 주요 모터 유형은 유도, 영구 자석, 권선 계자, 스위치드 릴럭턴스입니다. 유도 모터는 제어가 가장 쉬우며, 가장 많이 파악되어 있고, 산업계에서 가장 많이 사용되지만 그 단점은 계자를 여자해야 하기 때문에 손실이 발생한다는 것입니다. 영구 자석(PM) 모터는 자석이 로터 계자에 장착되어 로터 손실이 없어 전력 밀도가 높기 때문에 효율이 중요하고 크기가 제한되는 용도에서 많이 사용됩니다.
이러한 PM 모터는 인버터와 상당한 냉각이 필요하며 다양한 모드로 작동할 때 잘 관리해야 합니다. 이 모터도 계자가 쉽게 약해질 수 있어 CPSR(Constant Power Speed Ratio: 일정한 전력 속도 비율)에서 손실이 발생하는 단점이 있습니다. 약계자(field weakening)는 기기 속도를 높이기 위해 로터의 자기장을 줄이는 방법입니다. 유도 기기 또는 PM 기기에서 q축 전류를 주입하여 계좌를 약화할 수 있습니다. 많은 그룹이 그 dq0 플롯을 실시간으로 모니터링하는 데 관심을 갖고 있기 때문에 FOC의 q축(토크 제어용) 또는 d축(로터 계자 제어용) 전류 제어량을 알아야 합니다. PM 기기를 사용할 때는 약계자 과저에서 자석의 자기가 없어질 수 있어 고려할 점이 더 많으며 역기전력(back emf)를 모니터링해야 할 수도 있습니다.
동기 릴럭턴스(SR) 모터는 특정 패턴으로 접합하는 매우 단순한 로터입니다. 이 모터는 릴럭턴스 토크의 특성을 사용하여 회전 동작을 일으킵니다. 이 모터는 구조가 단순해 다양한 용도에서 매우 유용하지만 소음과 진동이 크다는 단점이 있습니다. 따라서 이 모터는 특정 시나리오에서만 사용되어 왔습니다. 이러한 기기를 테스트할 때 연구원들은 주로 토크와 속도 진동이 가장 강한 진동 맵을 확보하는 데 관심을 갖습니다.
모터가 차가울수록 손실이 적고, 손실이 적을수록 효율이 높습니다.
그리고 자석이 너무 뜨거워지면 특정 구간에서 자성이 없어지는 데 이것은 큰 문제가 될 수 있습니다. 따라서 권선과 스위치를 차갑게 유지하는 것이 매우 중요합니다. 스위치가 너무 뜨거워지면 손실이 높아지고 폭발할 수도 있습니다. 연구원들은 설계 시간의 대부분을 기기 효율을 높이기 위한 냉각 전략을 찾는 데 씁니다. 냉각 시스템은 주로 열을 제거해야 하는 영역 위로 물, 오일 또는 글리콜을 펌핑하거나 분사하는 방식입니다.
냉각 기기에 대한 부담 때문에 작동 및 테스트에서 모터 온도 모니터링이 중요한 부분이 되었습니다. 테스트할 때 열전쌍으로 온도를 모니터링하여 기록하거나 정지할 제어 시스템으로 전송하게 됩니다. 이렇게 기록된 값을 데이터와 동기화하면 제어기에 반응하여 일어나는 온도 변화 시점과 위치를 알 수 있게 됩니다. 이 역시 모델 검증에 데이터를 사용할 수 있는 영역입니다.
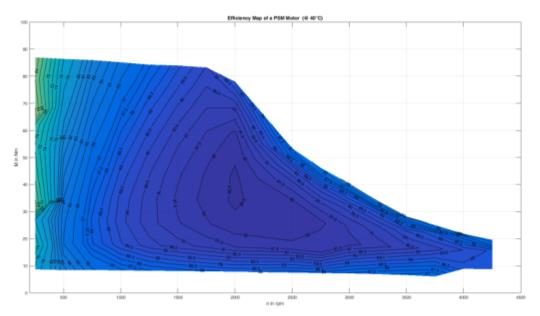
위에서 언급한 주세 대부분을 포괄할 수 있는 가장 좋은 방법이 효율 매핑과 동력계 테스트입니다. 누구나 자신의 시스템 효율을 높이길 원합니다. 이 경우 원시 데이터가 있어야 하는데, 그 이유는 무언가 잘못 되었을 때 이전 테스트를 참조하고 MATLAB 같은 사후 처리 프로그램에서 심층 분석을 실시할 수 있기 때문입니다. 그리고 동력계 테스트가 가장 중요한데, 그 이유는 동적 로딩을 실시하거나 드라이브 사이클을 테스트할 때 원시 데이터가 없으면 효율이 약간 이상하면서 부정확해질 수 있기 때문입니다.
그러면 원하는 모든 설정값에 대해 효율을 얻게 되고 효율 맵이 생깁니다. 특정 온도 범위에서 이러한 포인트를 가져옵니다. 설정값에서 측정하기 위해 기기가 식을 때까지 기다려야 하는 경우가 간혹 있습니다. 이 경우에 HBM의 eDrive testing system 을 사용하면 몇 초가 아니라 여러 사이클에서 테스트 포인트를 가져와 기기 가열 시간이 단축되기 때문에 고객의 시간을 크게 줄일 수 있습니다.
사람들이 기기의 한계를 테스트할 때 그 한계를 넘기거나 넘기려 하는 경우가 종종 있습니다. 사람들은 자신이 기기의 기계적 한계를 알기 위해 최고 속도 달성을 강행합니다. 데이터 버퍼가 있으면 연구원들은 기기 고장 위치와 고장 방식을 이해할 수 있습니다.