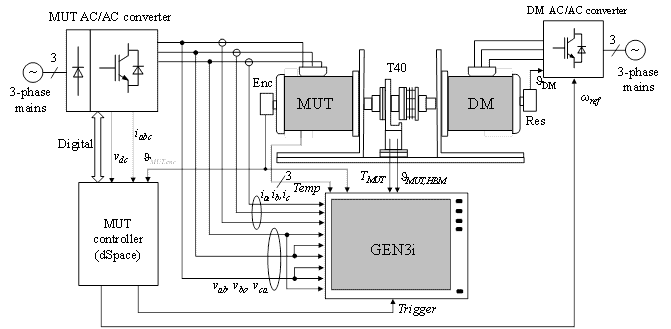
O banco de testes usado para o mapeamento do rendimento é mostrado na fig. 1. Este banco é composto pelos seguintes elementos principais:
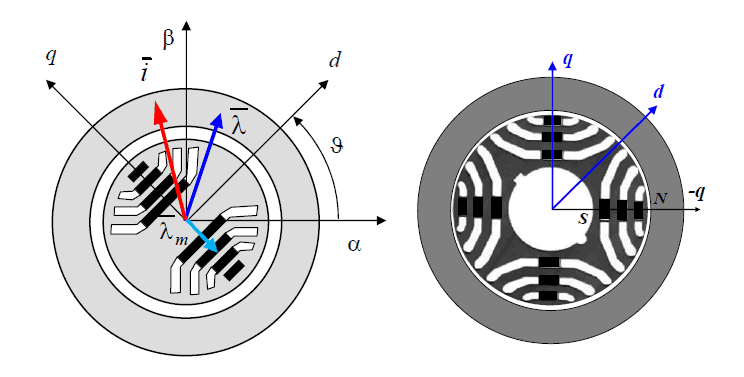
- O Motor Sob Teste (MUT) é um motor IPM (Internal Permanent Magnets);
- O controlador do motor é uma placa dSpace com uma interface analógica/digital dedicada;
- O Driving Motor (DM) é um motor de ímã permanente (PM) com velocidade controlada alimentado por um conversor bidirecional no qual a referência de velocidade é fornecida pela placa dSpace usando uma saída dSpace DAC (Digital-to-Analog Converter). Outra solução é usar uma interface CAN ou RS422, dependendo da capacidade de comunicação do conversor que alimenta o DM;
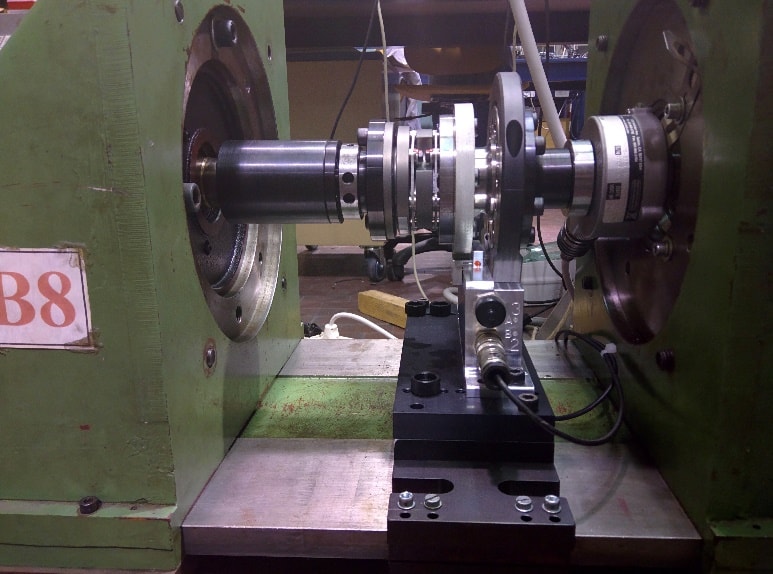
- O torque é medido com o sensor de torque de alta precisão T40 da HBM (fig. 2) que fornece o torque do eixo e também sua posição com uma resolução de 1.024 pulsos/rev (saídas tipo encoder). O sensor de torque é montado como um acoplamento mecânico entre o eixo do MUT e do DM. Os dados são transmitidos para o sistema de medição por meio de um transformador rotativo;
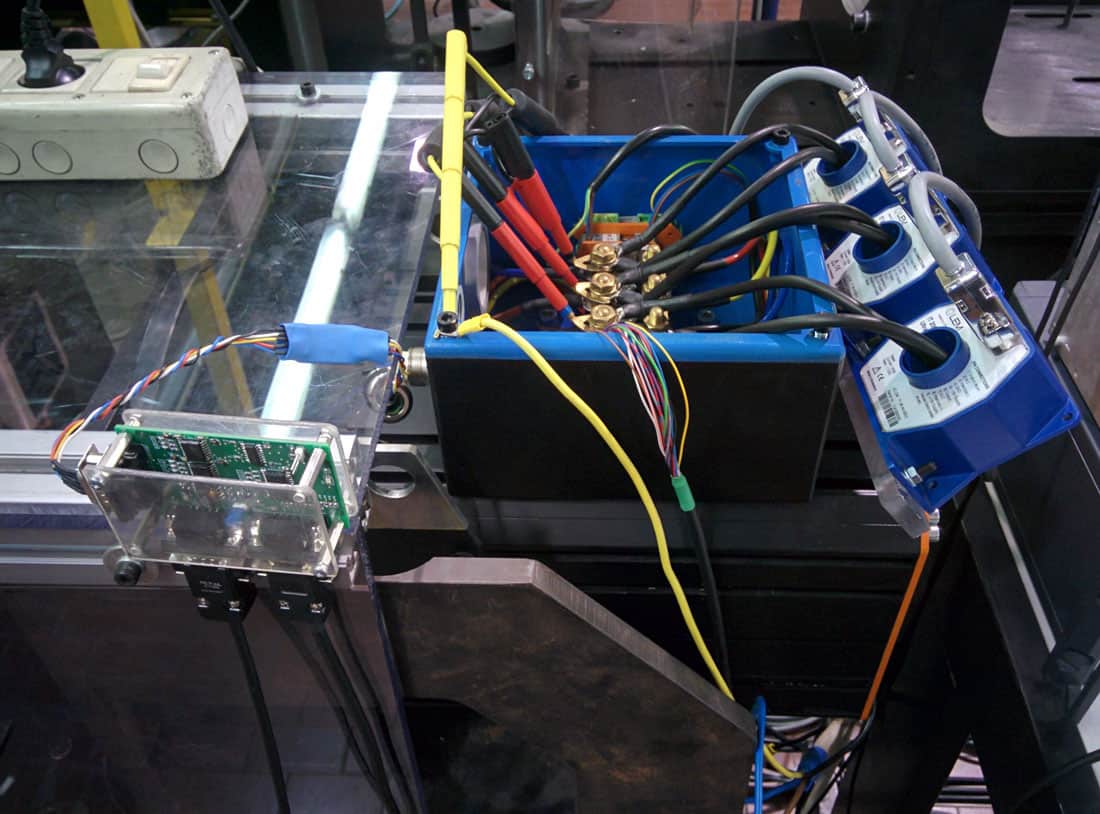
- As correntes de fase são medidas com os sensores externos LEM de alta precisão (fig. 3) que são alimentados por uma caixa que gerencia a corrente dos sensores e gera os resultados que são adquiridos pelo gravador de dados da HBM com canais de aquisição de alta velocidade, com uma taxa de amostragem de 2Msamples/s. As quedas de tensão nos shunts LEM são enviadas para o GEN3i usando cabos BNC;
- As tensões de linha MUT são diretamente medidas pelo gravador GEN3i usando canais de aquisição de alta tensão / alta velocidade com taxa de amostragem de 2Msamples/s. Neste caso, as tensões adquiridas são os pulsos PWM reais que são aplicados à máquina;
- Além da posição do rotor fornecida pelo sensor de torque T40, o GEN3i mede também a posição do rotor usando um encoder incremental que também é empregado pelo controlador do motor (conforme fig. 1). Um cartão divisor externo recebe os pulsos codificados do encoder e os envia para o controlador do rotor e para o GEN3i com isolamento galvânico;
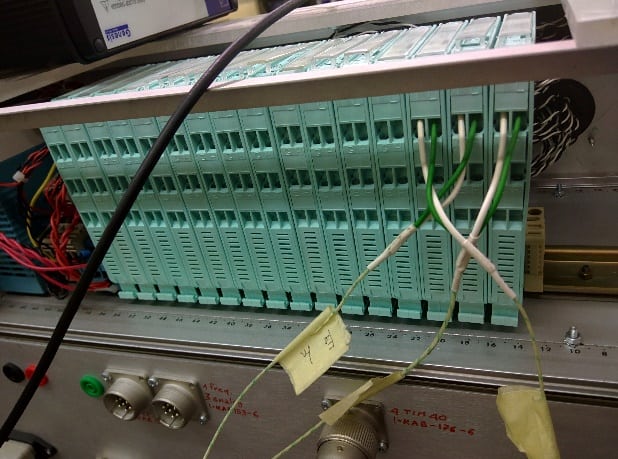
- A temperatura do motor é medida através de três termopares. Estes termopares são lidos por amplificadores com isolamento programável (fig. 4) na qual as saídas são fornecidas para um cartão de aquisição de baixa velocidade do GEN3i.
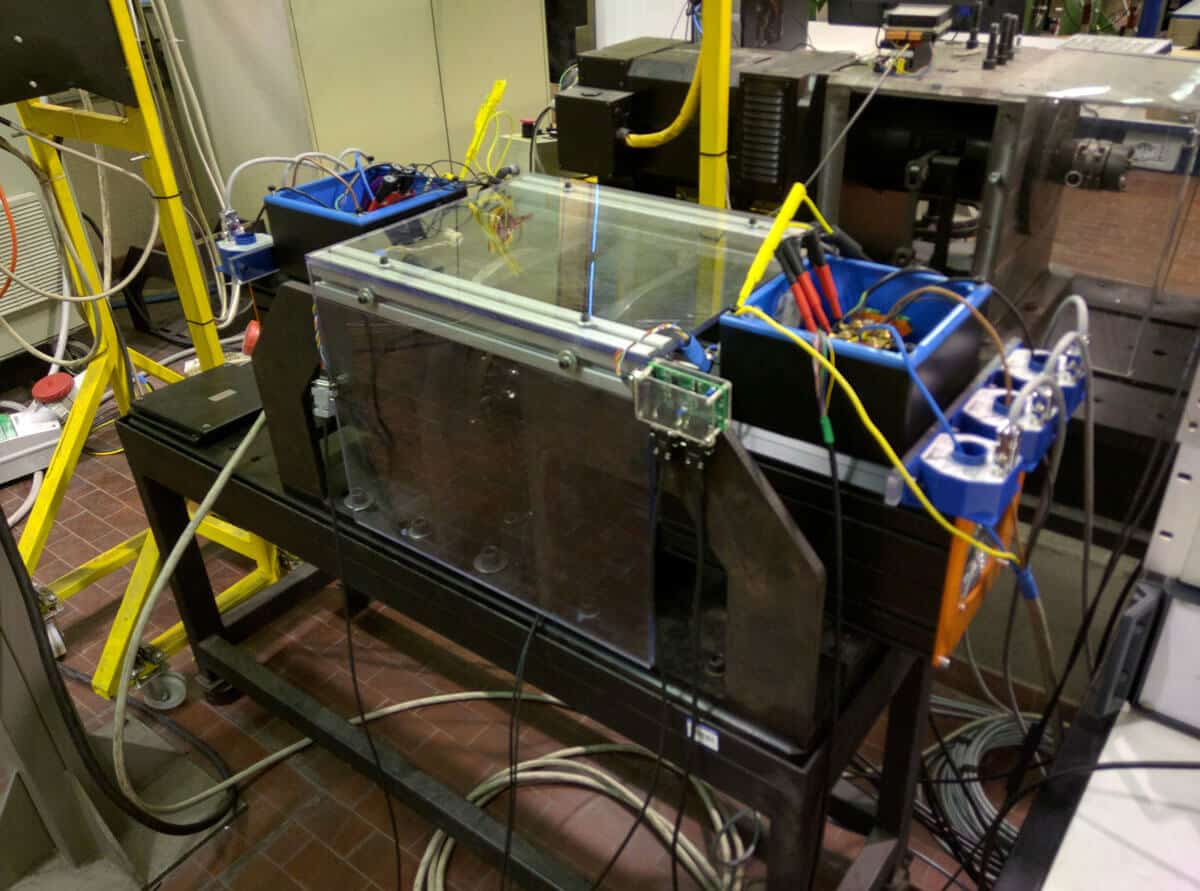
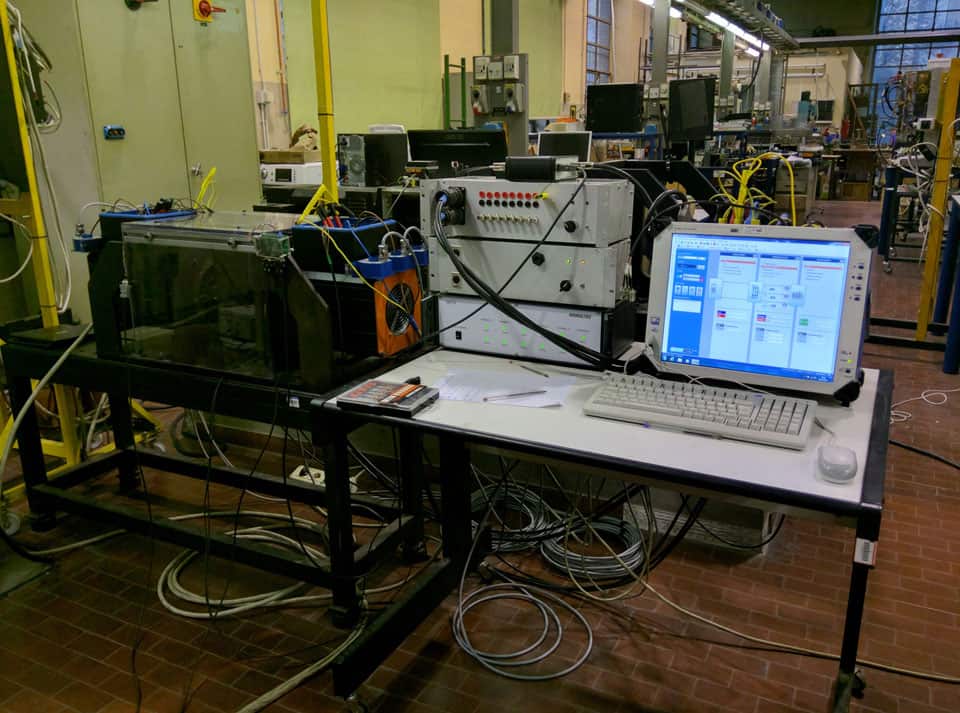
O MUT e o DM são mostrados na fig. 5, enquanto que a fig. 6 contém um panorama geral de todo o dispositivo de ensaios, incluindo o gravador de dados GEN3i da HBM.





 é a temperatura média do estator calculada como o valor médio das temperaturas medidas do estator k.
é a temperatura média do estator calculada como o valor médio das temperaturas medidas do estator k.





 é a potência de entrada do inversor que deve ser calculada a média para eliminar qualquer ondulação na tensão e na corrente do circuito DC.
é a potência de entrada do inversor que deve ser calculada a média para eliminar qualquer ondulação na tensão e na corrente do circuito DC.

 é a posição elétrica que é calculada a partir da posição mecânica medida, do número de polos pares e de um deslocamento que deve ser conhecido.
é a posição elétrica que é calculada a partir da posição mecânica medida, do número de polos pares e de um deslocamento que deve ser conhecido.