
- Jedes Modul ist eine Datenerfassungseinheit
- Mobil und autonom im Fahrzeug
- In Echtzeit integriert am Prüfstand
- Portabel im Service-Einsatz
- Dauerhaft installiert in Monitoring-Anwendungen
QuantumX: Universelles Messdatenerfassungssystem
Das Messdatenerfassungssystem (DAQ) QuantumX ist das perfekte Werkzeug für alle Ihre Aufgaben in der Prüf- und Messtechnik. QuantumX ist die erste Wahl, wenn es um zuverlässiges Erfassen verschiedener physikalischer Größen und Sensortechnologien geht. Es bietet einzigartige Möglichkeiten der Erfassung jeder Art von Signalen und Sensorinformationen.
Flexibel
Zuverlässig
- seit 10 Jahren im Markt etabliert und bei tausenden Kunden im Einsatz
- Hohe Messgenauigkeit durch patentierte Technologie
- Langzeitstabil mit integriertem Kalibrierschein
Einfache Bedienung
- Klein und portabel
- Intuitiv bedienbar mit der Software catman von HBM
- Offen für die Integration in viele weitere Software-Programme: LabVIEW, Visual Studio .NET, DIAdem, CANape und DASYlab
Eine zuverlässige Messkette
Das hochpräzise, universelle und zuverlässige Messdatenerfassungssystem QuantumX kann perfekt mit Sensoren von HBM und der Software catman kombiniert werden, um ein messtechnische Gesamtlösung zu erhalten. Vom Sensor bis zur Software: simply "plug and measure".

Vielfältig im Einsatz
 Prüfungen im Labor und im Prüfstand
Prüfungen im Labor und im Prüfstand
- Struktur- und Betriebsfestigkeitsprüfung
- Antriebsstrang, Motor, Dynamometertests
- Prüfen von mechanischen und elektrischen Systemen und Komponenten
- Aerodynamische Analysen/Windkanalversuche
 Mobile Messdatenerfassung
Mobile Messdatenerfassung
- Mobiles Erfassen von Lasten, die auf schlechter Strecke auf mechanische Bauteile wirken
- Prüfen der Fahrzeugdynamik (Fahrverhalten)
- Brems- oder Abnahmeprüfungen
- Überwachen ganzer Fahrzeuge oder Strecken
 Flugzeugtests
Flugzeugtests
- Struktur- und Betriebsfestigkeitsprüfung/Materialermüdungsprüfung
- Prüfen von Antriebssystemen (Schub, Leistung, Betriebsfestigkeit)
- Iron-Bird-Tests
- Aufpralltests: Fall- und Stoßversuche (Vogel, Drohne)
- Berechnung des Schwerpunkts
 Elektroantriebe und Energiespeicher
Elektroantriebe und Energiespeicher
 Service/Wartung
Service/Wartung
- Maschinenkalibrierung
- Fehleruntersuchung und Diagnose
 Infrastructural Health Monitoring
Infrastructural Health Monitoring
Kundenberichte und Referenzen

Sikorsky, ein Unternehmen von Lockheed Martin, und HBM haben die Betriebsfähigkeitsprüfung für das Datenerfassungssystem GEN6 abgeschlossen, das nun offiziell in Betrieb gehen wird.
Basierend auf dem universellen, verteilbaren Datenerfassungssystem QuantumX von HBM und in enger Zusammenarbeit mit dem Kunden entwickelt, wird das neue Datenerfassungssystem GEN6 die Labors von Sikorsky nun mit neuen Möglichkeiten für Datenerfassung, -verarbeitung und -speicherung verstärken.

„Wir hatten vier Messverstärkersysteme in der engeren Auswahl. QuantumX von HBM hat uns dann im Praxistest vor allem durch seine extrem geringe Messunsicherheit überzeugt.“
Bruno Kanzenbach, leitender Ingenieur bei der Toyota Motorsport GmbH (TMG)

„ Wir haben uns für QuantumX entschieden, da ganz einfach verschiedenste Sensoren angeschlossen werden können und es eine exzellente Aufzeichnungsleistung bietet, und zwar im Hinblick auf Messbereich und Messrate."
Matt Williams, leitender Versuchsingenieur in der Bauteilprüfung bei AgustaWestland

QuantumX Modulübersicht
Finden und vergleichen Sie die QuantumX-Module, indem Sie auf das Bild rechts klicken.
Wählen Sie je nach Kanalzahl, Abtastrate oder Signaltyp, wie z.B. Spannung, Strom, Dehnungsmessstreifentyp, etc. das für Sie geeignete Messmodul oder System.
Klicken Sie auf das Bild rechts, um es zu vergrößern.
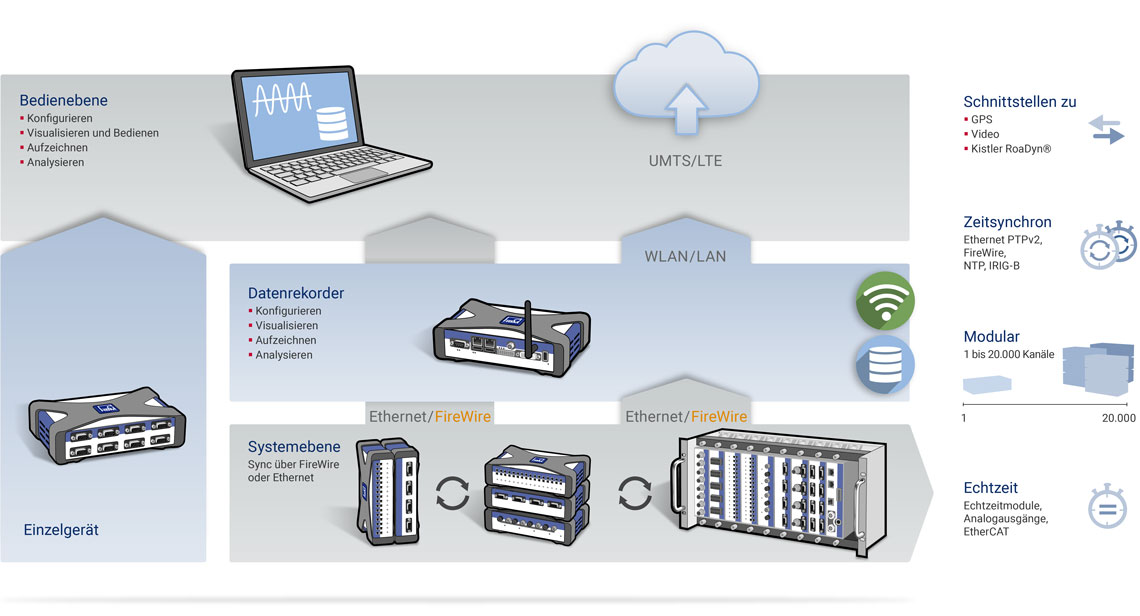
Modulares Konzept
- Schließen Sie ein einzelnes Modul an Ihren PC an und starten Sie Ihre erste Messung
- Kombinieren Sie mehrere Module, installieren Sie sie verteilt in der Nähe Ihrer Messstellen und Sensoren
- Skalieren Sie Hunderte von Kanälen in einem Modulträger, um eine maximale Kanaldichte zu erreichen.
- Steigen Sie für mobile Tests auf den leistungsstarken Datenrekorder um und integrieren Sie ihn in Ihre Cloud
- Integration in Echtzeit für automatisierte Prüfstände
- Gestalten Sie Ihren eigenen Versuch im Labormaßstab mit Echtzeit-Stimulation
- Integrieren Sie jeden Sensor und übertragen Sie die digitalen Messwerte in CAN oder analogen Spannungsausgang (Gateway)
QuantumX Module

MX440B und MX840B Universalmessverstärker
4- oder 8-Kanal Universalmessverstärker der QuantumX Familie
Unterstützt werden folgende Aufnehmertypen:
- DMS Voll- oder Halbbrücke (DC oder 4.8 kHz Trägerfrequenz)
-
DMS Viertelbrücke mit Adapter
-
Stromgespeiste piezo-elektrische Aufnehmer (IEPE / ICP®)
-
Piezo-resistive Vollbrücke
-
Widerstandsthermometer (PT100 / PT1000)Thermcouples (types K, N, R, S, T, B, E, J, C)
-
Ohmscher Widerstand
-
Potentiometrische Aufnehmer (Poti)
-
Induktive Halb- oder Vollbrücke, LVDT
-
Spannung (± 100mV, ± 10V, ± 60V) and Strom (0 / 4 … 20 mA, 2-/3- oder 4-Leiter)
-
an Kanal 5-8 zusätzlich: Frequenz, Zähler, Drehgeber, SSI
-
CAN bus
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX1615B/MX1616B DMS Brückenmessverstärker
16-Kanal Brückenmessverstärker der Quantumx Familie
Unterstützt werden folgende Aufnehmertypen:
- DMS Voll-, Halb- oder Viertelbrücke (DC or 1200 Hz Trägerfrequenz)
- Integrierte 120 und 350 Ohm Ergänzungswiderstände für Viertel-Brücken
- Spannung (± 10 V)
- Widerstandsthermometer (PT100)
- Ohmscher Widerstand
- Potentiometer (Poti)
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX410B Universalmessverstärker
4-Kanal, hochdynamischer Universalmessverstärker der QuantumX Familie
Unterstützt werden folgende Aufnehmertypen:
- DMS Voll- oder Halbbrücke (DC oder 4.8 kHz Trägerfrequenz)
- Stromgespeiste piezo-elektrische Aufnehmer (IEPE, ICP®)
- Piezo-resistive Vollbrücke
- Induktive Halb- oder Vollbrücke
- Spannung (±10 V)
- Strom (0 / 4...20 mA, 2-/3- oder 4-Leiter)
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX460B Impuls- und Frequenzmessmodul
4-Kanal hoch-dynamisches Digitalmodul der QuantumX Familie Zur Erfassung von: Drehmoment, Drehzahl, Winkel, Position und Weg
Unterstützt werden folgende Aufnehmertypen:
- Digitale hoch-aufgelöste Frequenzeingänge (z.B. HBM Drehmomentmesswelle)
- Impulszähler, Drehgeber, Encoder
- Passive induktive Drehzahlsensoren (AC gekoppelt)
- Pulsweitenmodulierte Signale (PWM)
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX430B Vollbrücken-Messverstärker
4-Kanal-Messmodul der QuantumX-Familie für die präzise Messung beim Anschluss von DMS-Vollbrücken-basierten Aufnehmern (statisch, dynamisch)
Unterstützt werden folgende Aufnehmertypen:
- DMS Vollbrücke (DC, 600 Hz Trägerfrequenz)
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul

MX238B Präzisionsmessverstärker
2-Kanal-Präzisionsmessmodul der QuantumX-Familie für die präzise Messung beim Anschluss von DMS-Vollbrücken-basierten Aufnehmern
Unterstützt werden folgende Aufnehmertypen:
- DMS Vollbrücke (225 Hz Trägerfrequenz)
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX1601B Universalmessverstärker
16-Kanal Messverstärker der QuantumX Familie
Unterstützt werden folgende Aufnehmertypen:
- Stromgespeiste piezo-elektrische Aufnehmer (IEPE, ICP)
-
Spannung (±100 mV, ±10 and ±60 V)
-
Strom (0/4 ... 20 mA, 2-/3- oder 4-Leiter)
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX1609 Thermoelementverstärker
16-Kanal Thermoelementverstärker derQuantumX-Familie
Unterstützt werden folgende Aufnehmertypen:
- Typ K Thermoelement (MX1609KB)
- Typ T Thermoelement (MX1609TB)
Erfahren Sie mehr HBMshopKalibrieren Sie Ihr Modul
![]()
MX809B Isolierter Thermoelementverstärker
8-Kanal-Thermoelementverstärker der QuantumX-Familie für isolierte und zuverlässige Thermoelementmessungen in einer elektrischen Umgebung
Unterstützt werden folgende Aufnehmertypen:
- Thermoelementtypen K, J, T, B, E, N, R, S, C mit interner Vergleichsstelle für jedem Kanal
- Spannung (±5 V)
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
 MX403B Isoliertes Spannungsmodul
MX403B Isoliertes Spannungsmodul
4-Kanal-Modul zur galvanisch getrennten Spannungsmessung mit der QuantumX-Familie
Unterstützt werden folgende Aufnehmertypen:
- Spannung (10, 100 and 1000 V)
- Messkategorien: 1250 V (non CAT), 1000 V CAT II, 600 V CAT III
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul

MXFS Modul für optische Sensoren
Modul mit 128 Kanälen zur Integration optischer und elektrischer Messungen in Ihre QuantumX Messkette
- Faser-Bragg-Gitter basierte Messunge von Dehnung, Kraft, Beschleunigung oder Neigung
- bietet mit 128 Kanäle pro Modul höchste Sensordichte und eine kostengünstige Lösung
- arbeitet als Einzelmodul oder zeitsynchronisiert als Gateway zu anderen QuantumX-Modulen
- bietet wählbare Datenerfassungsraten bis zu 2000 S/s pro Kanal (Sensor)

MX471 CAN / CAN FD Modul
4-Kanal-CAN-Modul zur Erfassung von CAN-Signalen oder Integration der QuantumX-Familie in CAN
-
Empfangen: Zeitsynchrone Erfassung von CAN-Nachrichten und -Signalen (Embedded Decoding)
-
Empfangen: Rohnachrichtenerfassung des gesamten CAN-Bus-Verkehrs und PC-basierte Dekodierung
-
Empfangen: Skalieren Sie bis zu einer unbegrenzten Anzahl von Modulen mit beispielsweise insgesamt 20 CAN-Knoten
-
Senden: Senden Sie jedes erfasste analoge Messsignal mit beispielsweise MX1615B oder einem anderen Modul
-
Gateway: CAN FD-auf-CAN-Gateway mit Neuverpacken von Nachrichten
-
Gateway: Senden Sie alle Daten von direkt angeschlossenen Modulen über Ethernet inkl. optionaler Zeitsynchronisation mit PTPv2
-
Interner, schaltbarer Abschlusswiderstand (Terminierung)
![]()
CX22B-W Datenrekorder
Der Datenrekorder CX22B-W bietet dank umfangreicher Rechenleistung folgende Möglichkeiten:
- Interne Datenspeicherung aller Signale angebundener QuantumX/SomatXR-Module
-
Autonome Aufzeichnung in robustem Datenformat, Export in andere Formate
-
Gateway-Funktionalität (LAN, WLAN) zum PC
-
Leistungsstarke Signalverrechnung und Analysen wie z.B. Klassierung, FFT, elektrische Leistungs- und Effizienzberechnung
-
Beeindruckende Visualisierungsoptionen
-
Integration von Kameras (Bild, Video), Positionserfassung (GPS/GNSS), Messräder, Wetterstation
-
Alarme/Benachrichtigungen über Signal- und Systemzustände
-
Einfache Bedienung (Touchscreen, aus der Ferne oder über direkt angeschlossene Tastatur)

CX27C Gateway-Modul
Das Gateway CX27C bietet einfache Integrationsmöglichkeiten:
-
Verbindung des QuantumX-Systems per Ethernet-Anschluss mit dem PC – Erfassung und Analyse aller Daten mit höchstmöglicher Datenrate mit der DAQ Software catman Easy / AP
-
Verbindung des QuantumX über xCP-on-Ethernet mit jeder beliebigen CAL-Software auf Ihrem PC
-
Parallel dazu, Integration der QuantumX/SomatXR-Module in Echtzeit (EtherCAT™ oder PROFINET IRT) zur Regelung, Steuerung, Automatisierung oder Überwachung. Mehrere CX27C- Module können in einem Datenerfassungssystem skaliert werden.
MX471 CAN / CAN FD Modul
4-Kanal-CAN-Modul zur Erfassung von CAN-Signalen oder Integration der QuantumX-Familie in CAN
-
Empfangen: Zeitsynchrone Erfassung von CAN-Nachrichten und -Signalen (Embedded Decoding)
-
Empfangen: Rohnachrichtenerfassung des gesamten CAN-Bus-Verkehrs und PC-basierte Dekodierung
-
Empfangen: Skalieren Sie bis zu einer unbegrenzten Anzahl von Modulen mit beispielsweise insgesamt 20 CAN-Knoten
-
Senden: Senden Sie jedes erfasste analoge Messsignal mit beispielsweise MX1615B oder einem anderen Modul
-
Gateway: CAN FD-auf-CAN-Gateway mit Neuverpacken von Nachrichten
-
Gateway: Senden Sie alle Daten von direkt angeschlossenen Modulen über Ethernet inkl. optionaler Zeitsynchronisation mit PTPv2
-
Interner, schaltbarer Abschlusswiderstand (Terminierung)
MXFS Modul für optische Sensoren
Modul mit 128 Kanälen zur Integration optischer und elektrischer Messungen in Ihre QuantumX Messkette
- Faser-Bragg-Gitter basierte Messunge von Dehnung, Kraft, Beschleunigung oder Neigung
- bietet mit 128 Kanäle pro Modul höchste Sensordichte und eine kostengünstige Lösung
- arbeitet als Einzelmodul oder zeitsynchronisiert als Gateway zu anderen QuantumX-Modulen
- bietet wählbare Datenerfassungsraten bis zu 2000 S/s pro Kanal (Sensor)
![]()
MX878B Analogausgangs-Modul
8-Kanal-Modul zur Ausgabe analoger Spannungen innerhalb der QuantumX-Familie
Das Modul bietet folgende Möglichkeiten:
-
8 analoge Spannungsausgänge (± 10V) zur Ausgabe von beliebigen Sensoreingängen in Echtzeit
-
Echtzeitberechnung (Matrix, PID, …)
-
Ausgabe von Sollprofilen (harmonisch oder arbiträr)
-
Direkte Ansteuerung von der PC-Ebene
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX879B Multi-I/O Modul
Multi-I/O-Modul zur Ausgabe analoger Spannungen sowie digitale Ein-/Ausgänge innerhalb der QuantumX-Familie
Das Modul bietet folgende Möglichkeiten:
-
8 analoge Spannungsausgänge (± 10V) zur Ausgabe von beliebigen Sensoreingängen in Echtzeit
-
32 digitale Ein-/Ausgänge (5 V, 24 V, bis 500 mA)
-
Echtzeitberechnung (Matrix, PID, Alarme, …)
-
Ausgabe von Sollprofilen (harmonisch oder arbiträr)
-
Direkte Ansteuerung von der PC-Ebene
Erfahren Sie mehr HBMshop Kalibrieren Sie Ihr Modul
![]()
MX471 CAN / CAN-FD Modul
4-Kanal-CAN-Modul zur Erfassung von CAN-Signalen oder Integration der QuantumX-Familie in CAN (FD)
-
Empfangen: Zeitsynchrone Erfassung von CAN-Nachrichten und -Signalen (Embedded Decoding)
-
Empfangen: Rohnachrichtenerfassung des gesamten CAN-Bus-Verkehrs und PC-basierte Dekodierung
-
Empfangen: Skalieren Sie bis zu einer unbegrenzten Anzahl von Modulen mit beispielsweise insgesamt 20 CAN-Knoten
-
Senden: Senden Sie jedes erfasste analoge Messsignal mit beispielsweise MX1615B oder einem anderen Modul
-
Gateway: CAN FD-auf-CAN-Gateway mit Neuverpacken von Nachrichten
-
Gateway: Senden Sie alle Daten von direkt angeschlossenen Modulen über Ethernet inkl. optionaler Zeitsynchronisation mit PTPv2
-
Interner, schaltbarer Abschlusswiderstand (Terminierung)
catman Datenerfassungssoftware
Die Software catman von HBM ist bestens für den Einsatz zusammen mit QuantumX und SomatXR geeignet. Catman bietet eine außergewöhnliche Visualisierung Ihrer Sensor- und digitalen Daten, speichert Daten in einem robusten binären Format, ermöglicht eine Automatisierung, analysiert Daten unmittelbar oder im Post-Process-Modus und erzeugt Testreports.
- Visualisierung von Messdaten
- Online-Analyse durch leistungsstarke Mathematik-Bibliothek
- Speichern und exportieren von Daten in verschiedene Formaten
- Datenanalyse
- Reporting

QuantumX provides you supplementary accessories for your measurement applications and projects.
Dieses Video zeigt die vielseitigen Anwendungsmöglichkeiten von QuantumX.
In diesem Video sehen Sie, wie Sie mit unserer Software catman Enterprise viele Messkanäle parametrieren und visualisieren können.