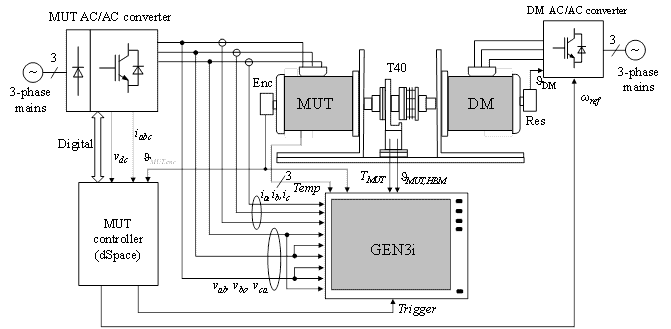
효율과 손실을 매핑(mapping)하기 위한 시험 장비는 그림 1에 제시되어 있습니다. 시험 장비는 다음과 같은 요소로 구성되어 있습니다.:
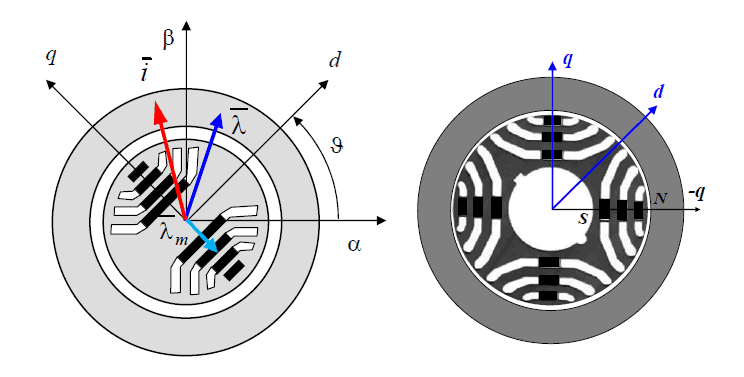
- 시험용 모터(Motor under Test, MUT)는 내장형 영구자석(Permenant Magnet) 모터입니다.
- 모터 컨트롤러는 전용 아날로그/디지털 인터페이스가 있는 dSpace 보드입니다
- 구동 모터(Driving Motor, DM)는 속도 제어 영구자석(PM) 모터로서, 속도는 아날로그 dSpace DAC(디지털 대 아날로그 컨버터)를 이용하여 dSpace 보드가 제공하는 참조 속도이며, 양방향 컨버터가 구동합니다. 또 다른 솔루션은 DM에 동력을 공급하는 컨버터의 통신 능력에 의존하며, CAN 또는 RS422 인터페이스를 사용합니다.
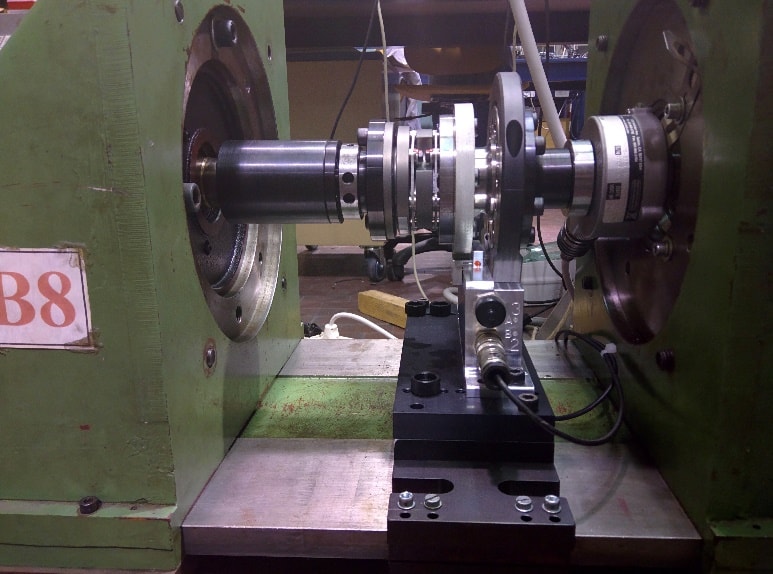
- 토크는 샤프트 토크(shaft torque)를 제공하고 1024pulse/rev(encoder type output)의 분해능으로 샤프트 위치도 제공하는 고정밀 HBM T40 토크 센서(그림 2)를 이용하여 측정합니다. 토크 센서는 MUT 샤프트와 DM 샤프트 사이에 기계적 커플러(mechanical coupler) 형태로 장착됩니다. 데이터는 회전식 변압기(rotating transformer)를 이용하여 측정 시스템으로 전송됩니다.
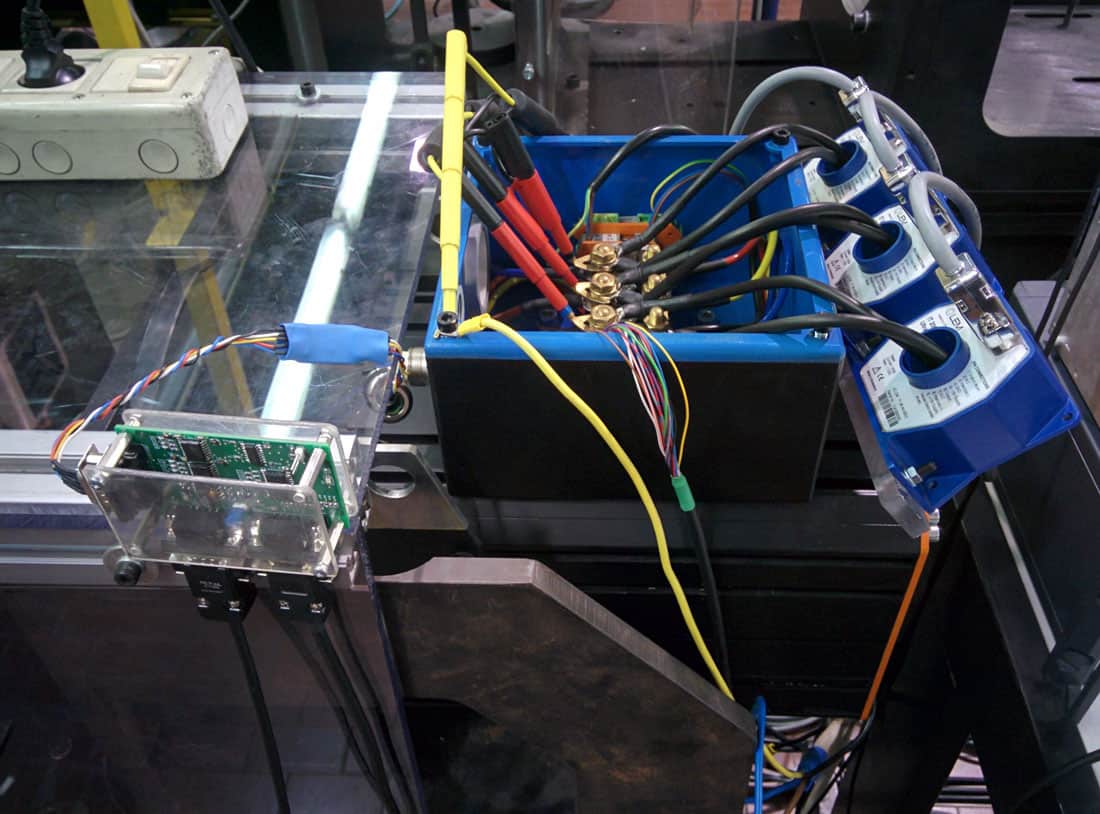
- 위상 전류는 고정밀 외부 LEM 센서(그림 3)를 이용해 측정하며, 전류 센서 박스가 센서에 전력을 공급하는데, 이 박스는 전류 센서를 관리하고 출력을 발생시키며, HBM 데이터 리코더는 2Msample/s의 샘플링 속도로 고속 획득 채널을 이용해 출력을 획득합니다. LEM 분류기(shunt)에서 강하된 전압은 BNC 케이블을 통해 Gen3i로 전송됩니다.
- MUT의 선간(line-to-line) 전압은 Gen3i 리코더가 샘플링 속도 2Msample/s로 고전압/고속 획득 채널을 이용해 직접 측정합니다. 이러한 방식으로 획득된 전압은 모터에 공급되는 실제 펄스 폭 변조(PWM) 펄스입니다.
- T40 토크 센서가 제공하는 회전자(rotor) 위치 이외에, Gen3i도 모터 컨트롤러를 사용하는 증분형 인코더(incremental encoder)를 이용하여 회전자의 위치를 측정합니다(그림 1 참조). 외부 스플리터 카드(external splitter card)는 인코더에서 인코더 펄스를 받아, 갈바닉 절연(galvanic insulation)으로 이를 모터 컨트롤러와 Gen3i에 전송합니다.
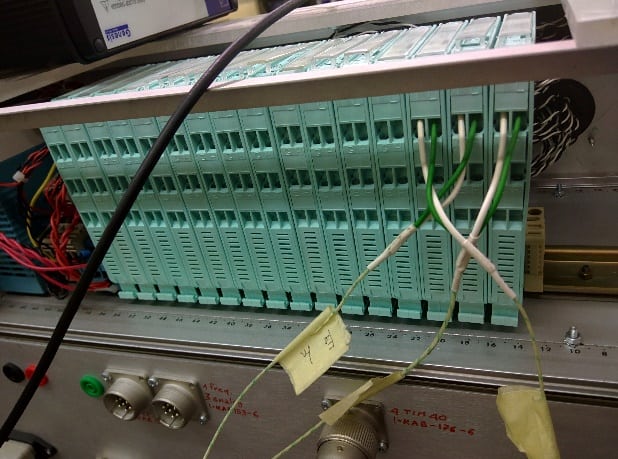
- 모터의 온도는 서모커플(thermocouple) 3개를 이용해 측정합니다. 서모커플의 온도는 프로그램식 분리 앰프(programmable isolation amplifier)(그림 4)가 읽으며, 앰프의 출력은 Gen3i의 저속 획득 카드로 전송됩니다.
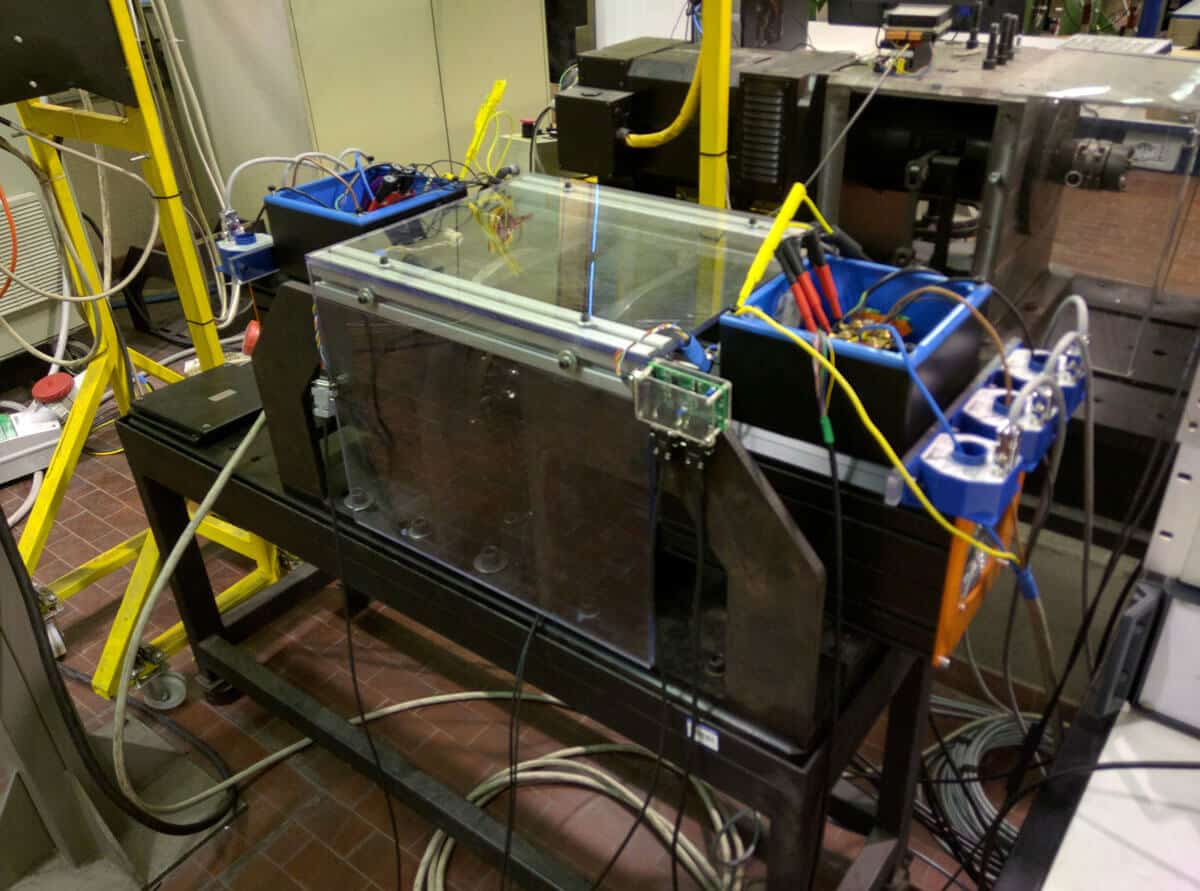
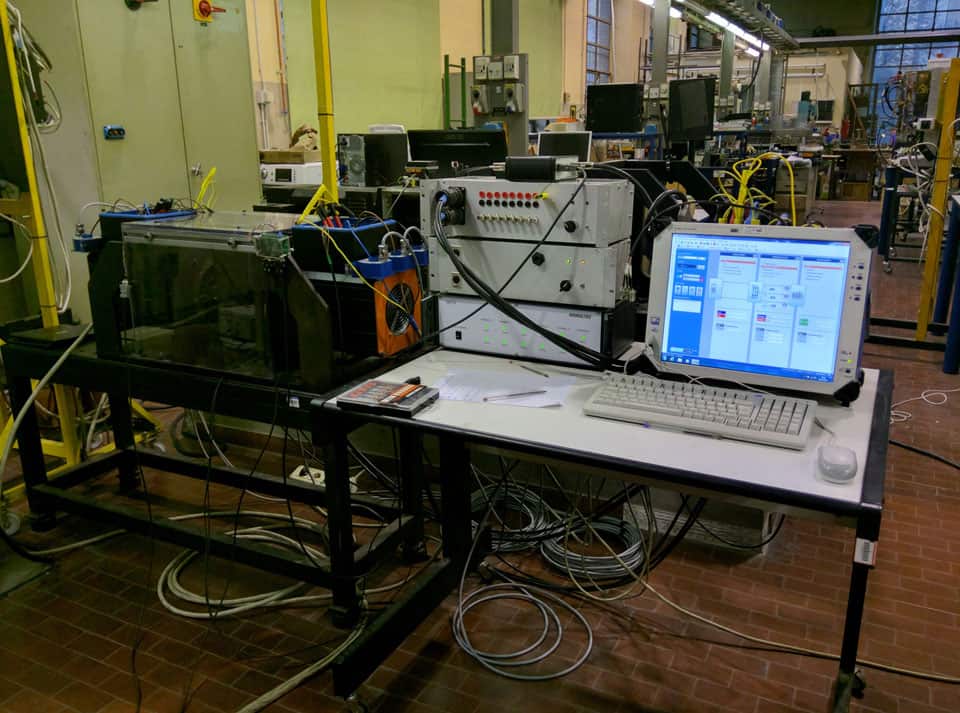
그림 6에서 HBM Gen3i 데이터 리코더를 포함한 전체 시험 장비를 확인할 수 있으며, 그림 5에는 MUT와 DM이 제시되어 있습니다.