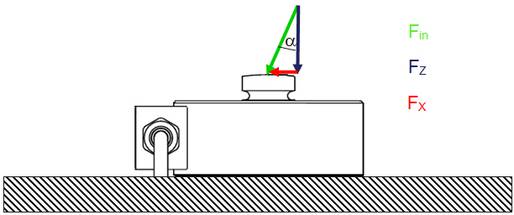
 a. 侧向力
a. 侧向力 b. 弯矩
b. 弯矩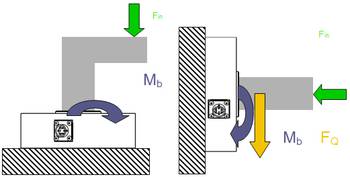


压向力传感器在应用中一般需要将负载加载到传感器压头上。
在实际应用中,有多种模块加载到压头上,包括如下图所示的加载头。
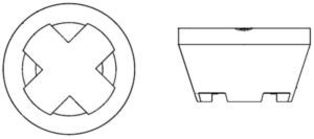
加载头一般是放置在力加载点上即可。必须要注意的是在传感器和加载头之间不能有任何多余物体。加载头带有旋转轴承,可以改变角度,因此可以防止扭矩和弯矩应用到传感器上。
如果力传感器在应用中不带有 加载头 之类的模块,应用区域必须要满足以下要求:
- HBM 推荐 硬度 至少达到 43 HRC
- 工作区必须带有地基
- 安装时,相配合的部件不能升起,并且传感器不能受到影响
- 如果可能,相配合的部件要 能够旋转,以便防止扭矩和弯矩
一般来说,力传感器只需要放置在应用结构中即可。只需将力导入到应用结构中即可。水平安装 也是可以接受的,在这种情况下,传感器必须采用刚醒连接。
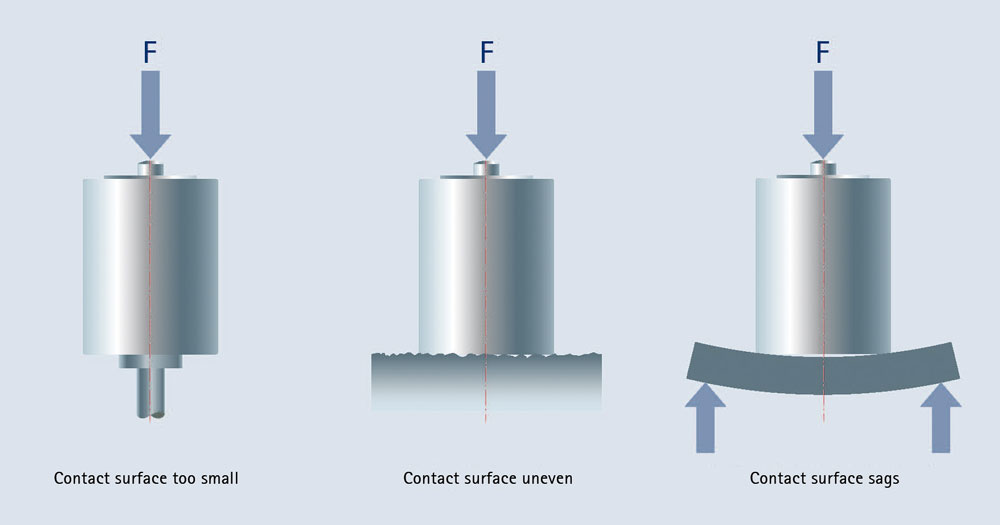
在任何情况下,传感器的底部结构部件只有能 微小的变形。也就是说,应保证 足够的刚度。
还有需要注意的是要保持表面平坦,耐受的最大不均匀性为0.005毫米。 一个平坦的结构表面能够保证测量精度。
基础结构必须比传感器直径大,并且需要不易变形。尤其是对于下部结构来说。在传感器设计中,不考虑变形状态,因此相关的技术参数,灵敏度,线性和滞后等可能改变