
- すべてのモジュールがデータ収集をサポート
- 車両試験でのモバイル計測/スタンドアロン計測で
- テストベンチのリアルタイムバスへの統合
- サービス業務でのポータブル利用
- 据え付け型の監視アプリケーション
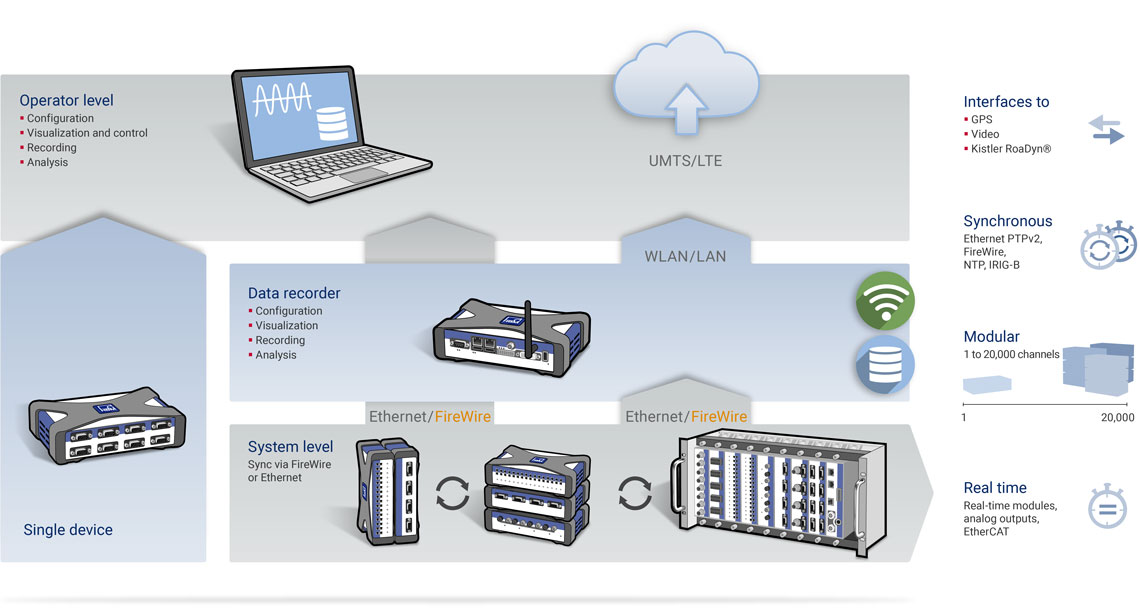
QuantumX: 汎用・分散配置型データ収集システム
データ収集システムQuantumX (DAQ) は、あらゆる試験・計測に使用できる汎用性の高いシステムです。センサで計測した様々な物理量を高い信頼性で収集できます。センサからのあらゆる信号を収集する特別な機能を備えています。
柔軟性
高信頼性
- 長期にわたる多数の導入実績
- 特許技術をベースにした高い計測精度
- 長期安定性を実現(校正証明書内蔵)
使いやすさ
- 小型でポータブル
- HBMのcatmanソフトウェアによる直感的な操作
- オープンソースソフトウェアに統合-LabVIEW, Visual Studio .NET, DIAdem, CANape, DASYLab, …
信頼性の高い計測チェーン
非常に正確で汎用性と信頼性の高いデータ収集システムQuantumXは、HBMのセンサとcatmanソフトウェアと組み合わせて、完全な試験・計測ソリューションを構成します。簡単に使える「プラグ&メジャー」対応。

アプリケーション
 テストベンチ計測
テストベンチ計測
- 構造耐久性試験
- ダイナモでのパワートレイン、エンジン、ドライブトレインテスト
- 機械的および電気的システムおよびコンポーネントのテスト
- 航空宇宙/風洞試験
 モバイルデータ収集
モバイルデータ収集
- 機械部品への負荷計測におけるモバイルデータ収集(悪路やトラック)
- 車両ダイナミクス試験(乗り心地や操縦性など)
- ブレーキ試験や評価試験
- 車両ならびにトラックの全体モニタリング
 航空機試験
航空機試験
- 構造耐久性試験/疲労試験
- 推進試験(推力、性能、耐久性)
- アイアンバード試験
- 衝撃試験:落下試験、衝突試験(バードストライク、ドローン)
- 重心解析
 電気駆動系システム&エネルギー
電気駆動系システム&エネルギー
 サービス/メンテナンス
サービス/メンテナンス
- 装置のキャリブレーション
- 欠陥調査ならびに診断
 構造物のヘルスモニタリング
構造物のヘルスモニタリング
お客様の声

ロッキード・マーティンの子会社のSikorsky社とHBMは、正式にリリースされたばかりの新型データ収集システムGEN6のオペレーショナル・レディネス・レビュー(ORR)を締結しました。
この新型データ収集システムGEN6は、HBMの汎用・分散配置型データ収集システムQuantumXを基本に、お客様との密接な協力により開発されました。Sikorskyの研究所に、データ取得、処理、記録に関する新機能を提供しています。

「まず候補を4つの計測アンプシステムに絞り込みました。その後、HBMのQuantumXは実用的なテストで、特に計測の不確かさが極端に低いことから、勝ち残りました。」
Bruno Kanzenbach氏、Toyota Motorsport GmbH (TMG)のシニアエンジニア

「QuantumXは非常に汎用性が高く簡単になんでも接続可能できるうえ、記録レンジと記録速度の両方に優れています」
Matt Williams氏、Agusta Westland社シニア構造テストエンジニア

QuantumXモジュールの比較表
右側の画像をクリックして、ご希望のQuantumXモジュールを見つけてください。
チャンネル数、サンプルレート、または信号タイプ(電圧、電流、ひずみゲージタイプなど)に基づいて、適切な計測モジュールを選択してください。
お客様のニーズに合った適切なQuantumX製品を見つけたら、ページを下にスクロールして詳細をご覧ください。
モジュール構造
モジュールをPCに接続しすぐに作業を開始
複数モジュールを分散配置し、計測ポイントやセンサ付近に設置
まとめて数百チャネルをスケーリングし、多チャンネル化
自動モバイルテストに強力なデータレコーダーを使用し、クラウドに統合
自動テストベンチにリアルタイムで統合
カスタム試験を設計しリアルタイムに実行
あらゆゆるセンサを統合し、デジタル信号をCANバスやアナログ電圧出力(ゲートウェイ)に転送
QuantumXモジュール

ユニバーサルデータ収集モジュール MX440B / MX840B
QuantumXシリーズ MX440B / MX840B
センサの種類
-
4ゲージ式または2ゲージ式ひずみゲージ(DCまたは搬送波4.8 kHz)
-
アダプタ付き1ゲージ式ひずみゲージブリッジ
-
電流給電圧電式変換器(IEPE/ICP®)
-
ピエゾ抵抗4ゲージ式ブリッジ
-
測温抵抗体 (PT100 / PT1000)
-
熱電対(タイプK、N、R、S、T、B、E、J、C)
-
抵抗
-
ポテンショメータ(Poti)
-
電磁誘導型 2/4ゲージ式、LVDT
-
電圧(±100mV、±10V、±60V)および電流(0/4~20mA、2/3/4線式)
-
チャンネル5-8追加で:周波数計測、パルスカウンタ、ロータリエンコーダ、SSI
-
CAN信号
![]()
ユニバーサルデータ収集モジュールMX410B
QuantumXファミリの4チャンネル高ダイナミック汎用アンプ
以下のトランスデューサ技術に対応:
-
2/4ゲージ式ひずみゲージ(搬送波4.8 kHzのDCまたはCF)
-
アダプタを介した1ージ式ひずみゲージ
-
電流給電圧電式変換器(IEPE/ICP®)
-
ピエゾ抵抗4ゲージ式ブリッジ
-
電磁誘導型 2/4ゲージ式
-
電圧(±10 V)
-
電流(0/4~20mA、2/ 3/4線式)
-
アナログ電圧出力(±10 V)
![]()
周波数カウンタモジュールMX460B
QuantumXファミリのトルク、回転速度、角度、位置、および変位データ取得用の4チャンネル高ダイナミックデジタルモジュール
以下のトランスデューサ技術に対応:
-
デジタル、高分解能の周波数入力(HBMのトルクフランジなど)
-
パルスカウンタ、インクリメンタルエンコーダ、エンコーダ
-
パッシブ誘導回転速度センサ(AC結合)
-
パルス幅変調信号(PWM)
![]()
高精度アンプモジュール MX430B
QuantumXファミリ用の4チャンネルブリッジ計測モジュール、4ゲージ式ひずみセンサ(ダイナミック、スタティック)からの入力信号を高い精度で計測
以下のトランスデューサ技術に対応:
- 4ゲージ式ひずみゲージブリッジ(DC、搬送波600 Hz)

高精度アンプモジュールMX238B
4ゲージ式SGブリッジベースのセンサが接続されている場合の高精度計測用、QuantumXファミリの2チャンネル高精度計測モジュール
以下のトランスデューサ技術に対応:
- 4ゲージ式ひずみゲージブリッジ(搬送波225 Hz)
![]()
ひずみゲージ ブリッジ アンプモジュールMX1615B/MX1616B
QuantumX ファミリの16チャンネル・ブリッジアンプ
以下のトランスデューサ技術に対応:
-
2/4ゲージ式ひずみゲージブリッジ(DCまたは搬送波1200Hz)
1ゲージ式ひずみゲージブリッジ(DCまたは搬送波1200 Hz、120/350/1000 Ωの完成抵抗) -
電圧(±10 V)
-
測温抵抗体 Pt100
-
抵抗
-
ポテンショメータ(Poti)
![]()
ユニバーサルデータ収集モジュールMX1601B
QuantumX ファミリの16チャンネル・アンプ
以下のトランスデューサ技術に対応:
-
電流給電圧電式変換器(IEPE/ICP®)
· 電圧(±100 mV、±10および±60 V)
· 電流 (0/4 ~ 20 mA、2/3/4線式)
![]()
熱電対モジュールMX1609
QuantumX ファミリの16チャンネル・熱電対アンプ
以下のトランスデューサ技術に対応:
- タイプK熱電対(MX1609KB)
- タイプT熱電対(MX1609TB)
![]()
熱電対/電圧入力モジュールMX809B
電気的絶縁性と信頼性の高い熱電対計測用、QuantumXファミリの8チャンネル熱電対アンプ
以下のトランスデューサ技術に対応:
-
熱電対 type K、N、R、S、T、B、E、J、チャンネル別冷接点付き
-
電圧(±5 V)
 高電圧入力モジュールMX403B
高電圧入力モジュールMX403B
QuantumXファミリの絶縁電圧計測用の4チャンネル・モジュール
これは以下の計測量をサポートします:
-
電圧(10、100および1000 V)
-
計測カテゴリ:1250 V(非CAT)、1000V CAT II、600V CAT III
![]()
CANモジュールMX471B
CAN信号の取得またはQuantumXファミリをCANに統合するための4チャンネルCANモジュール
-
CAN信号の時間同期取得(生またはデコード)
-
CAN上での計測信号転送(DBCファイルの生成)
-
xCP-on-CAN信号の時間同期取得
-
CAN-to-CANゲートウェイ(電気絶縁、再パッケージ化、タイプキャスト)
-
内部の切り替え可能な終端抵抗(終端)

ゲートウェイCX27C
ネットワークへの統合が容易に:
- リアルタイムでQuantumX/SomatXRモジュールに接続 (EtherCAT™ または PROFINET IRT経由)し、調整、制御、自動化、モニタリングを実行可能
- 同時にPC上の計測ソフトウェアで、同期のとれた信号データの収集と分析を実行(最高サンプリングレート:100kS/s)
![]()
データレコーダCX22B-W
完璧なデータロガー:
-
接続されたQuantumX / SomatXRモジュールのすべての信号を内部保存
-
スタンドアロンで堅牢なデータフォーマットでの記録、他のフォーマットへのエクスポート
-
PCへのゲートウェイ機能(LAN、WLAN)
-
強力な信号の計算と解析、例えば計数、FFT、電力と効率の計算
-
優れた可視化オプション
-
カメラ(写真、ビデオ)、測位(GPS / GNSS)、計測ホイール、天気予報の統合
-
信号およびシステムステータスのアラーム/通知
-
簡単操作(タッチスクリーン、リモート、または直接接続されたキーボードで操作)
![]()
CANモジュールMX471B
CAN信号の取得またはQuantumXファミリをCANへ統合するための4チャンネルCANモジュール
-
CAN信号の時間同期取得(生またはデコード)
-
CAN上での計測信号転送(DBCファイルの生成)
-
xCP-on-CAN信号の時間同期取得
-
CAN-to-CANゲートウェイ(電気絶縁、再パッケージ化、タイプキャスト)
-
切り替え可能な内部ターミナル抵抗(終端)
![]()
アナログ出力モジュールMX878B
QuantumXファミリのアナログ電圧出力用8チャンネルモジュール
このモジュールは以下を提供:
-
任意のセンサ入力のリアルタイム出力用、8個のアナログ電圧出力(±10 V)
-
リアルタイム演算(マトリックス、PID、アラームなど)
-
プロファイル出力を設定(高調波または任意)
-
PCレベルからの直接制御
![]()
マルチ I/OモジュールMX879B
MultiQuantumXファミリのアナログ電圧およびデジタル入出力用のマルチ I/Oモジュール(QuantumXファミリの内で使用)
このモジュールは、以下の機能を提供:
-
8個のアナログ電圧出力(±10 V)、任意のセンサ入力のリアルタイム出力用
-
32個のデジタル入/出力(5 V、24 V、最大500 mA)
-
リアルタイム演算(マトリックス、PID、アラームなど)
-
プロファイル出力を設定(高調波または任意)
-
PCレベルからの直接制御
![]()
CANモジュールMX471B
CAN信号の取得またはQuantumXファミリをCANへ統合するための4チャンネルCANモジュール
-
CAN信号の時間同期取得(生またはデコード)
-
CAN上での計測信号転送(DBCファイルの生成)
-
xCP-on-CAN信号の時間同期取得
-
CAN-to-CANゲートウェイ(電気絶縁、再パッケージ化、タイプキャスト)
-
切り替え可能な内部ターミナル抵抗(終端)
データ収集・解析ソフトウェアcatman
catmanソフトウェアをQuantumXとSomatXRと完全に統合しました。catmanは、センサのデジタルデータを可視化、堅牢なバイナリ形式で保存、自動化、データをその場で分析、後処理モードで分析、テストレポートの生成などを実行します。
互換性のあるソフトウェアパッケージ:
- LabVIEW
- Microsoft Visual Studio .NET
- CANape
- DASYLab

QuantumX provides you supplementary accessories for your measurement applications and projects.
QuantumX ビデオ & パンフレット
このビデオは、QuantumXが提供する様々な機能を紹介します。
このビデオでは、catman Enterpriseソフトウェアを使用して、大規模な計測チャンネル設定、データをグラフなどで画面表示する方法を紹介します。